

A quadcopter autonomous obstacle avoidance and navigation method based on binocular camera
A quadcopter and binocular camera technology, applied in the field of quadcopter autonomous obstacle avoidance and navigation based on binocular cameras, can solve the problems of limited application scenarios, quadcopter easy to deviate from the planned path, and low accuracy , to achieve the effect of improving execution speed, good positioning accuracy, and reducing storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0053] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
[0054] Offboard: external mode;
[0055] ORB (Oriebted Fast and Rotated BRIEF): an algorithm for fast feature point extraction and description;
[0056] ICP (Iterative Closest Point): iterative closest point algorithm;
[0057] BA (Bundle Adjustment): bundle adjustment method;
[0058] Bounding Box: bounding box;
[0059] AABB (Axis-aligned bouding box): The smallest hexahedron that surrounds an object and is parallel to the coordinate axis;
[0060] Max-min: A bounding volume is uniquely defined by the upper right corner and the lower left corner;
[0061] RRT*(Rapid-exploration Random Tree Star): rapid exploration of random tree algorithm;
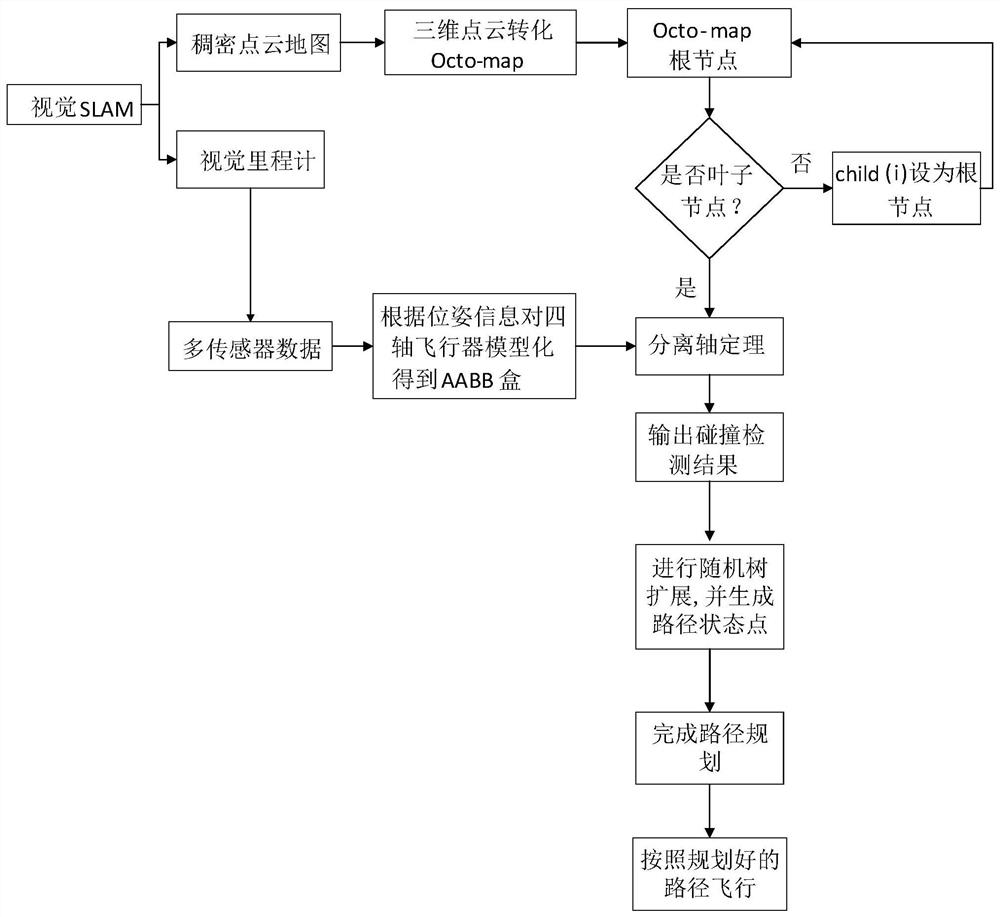
[0062] figure 1 It is a flow chart of the autonomous obstacle avoidance and navigation method of the quadcopter based on the binocular camera of the present invention.
[0063] The autonomous obst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More