

A leg structure of a wheel-foot integrate robot is disclosed
A robot, all-in-one technology, applied in the field of robots, can solve problems such as low travel speed, and achieve the effects of fast response speed, high control accuracy and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
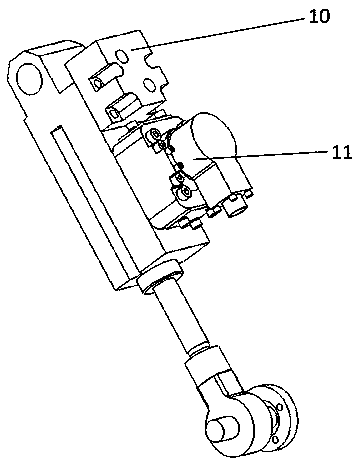
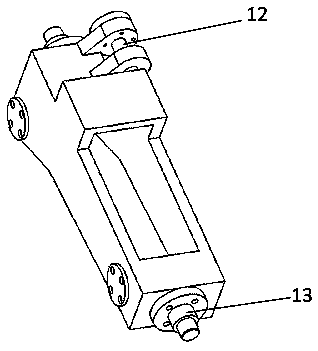
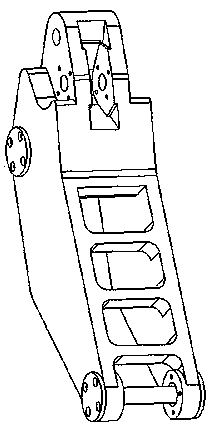
[0020] A wheel-foot integrated robot leg structure, its structure is as follows figure 1 As shown, it includes: first hydraulic cylinder (1), connecting rod (2), second hydraulic cylinder (3), thigh connecting rod (4), third hydraulic cylinder (5), calf (6), spring (7 ), wheel (8), stepper drive integrated machine (9), oil block (10), servo valve (11), pin shaft (12), yaw shaft (13).
[0021] The piston rod of the first hydraulic cylinder (1) is hinged with the connecting rod (2) to form a swaying hip joint, and the connecting rod (2) and the second hydraulic cylinder (3) are respectively hinged with the upper part of the thigh connecting rod (4) to form a hip joint , the thigh connecting rod (4) and the third hydraulic cylinder (5) are respectively hinged with the upper part o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More