

Bidirectional driving ankle rehabilitation training exoskeleton
A rehabilitation training and two-way drive technology, applied in muscle training equipment, sports accessories, manipulators, etc., can solve the problems of increased energy consumption of lower limb injured lower limb muscles, complex exoskeleton structure, and inconvenient wear by patients, so as to optimize the walking process of the human body , Restore the walking function of the ankle joint, and the effect of exercise is good
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below with reference to the accompanying drawings and specific embodiments, so that those skilled in the art can better understand and implement the present invention, but the examples cited are not intended to limit the present invention.
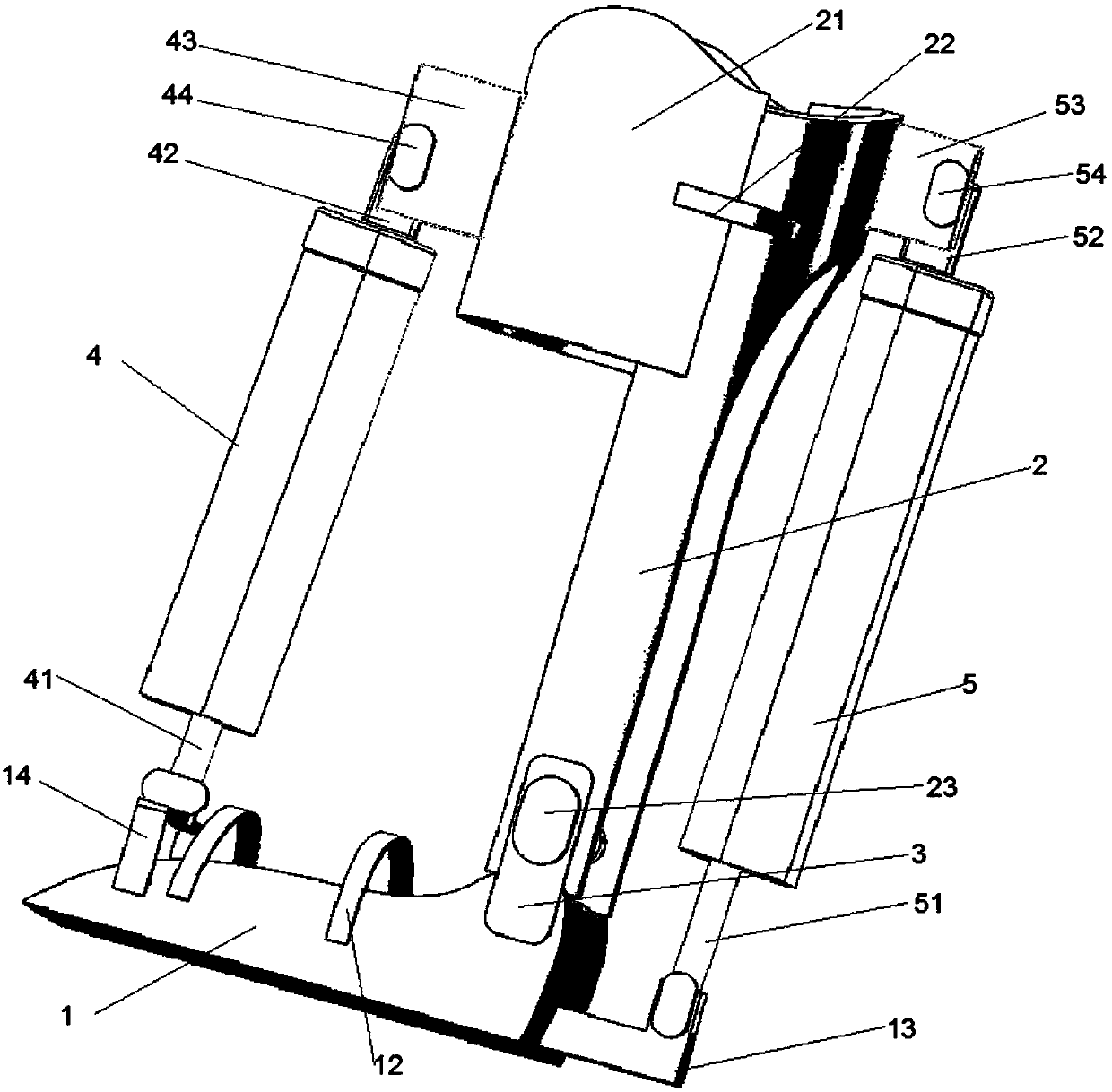
[0026] Reference figure 1 , figure 2 As shown, a two-way drive ankle joint rehabilitation training exoskeleton includes a foot cover, a first drive device for controlling the ankle dorsiflexion movement, a second drive device for controlling the plantar flexion movement of the ankle joint, and A calf sleeve matching the calf, the first driving device and the second driving device have the same structure, and the first driving device and the second driving device are respectively arranged on both sides of the calf sleeve;
[0027] The calf sleeve includes a front sleeve 21 and a rear sleeve 2, the front sleeve 21 is disposed on the rear sleeve 2, and the lower end of the rear sleeve 2 is hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More