Fruit fly larva simulated soft robot based on shape memory alloy
A technology of memory alloys and robots, which is applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems affecting motion efficiency and heating efficiency of shape-memory alloy wires, and achieve precise motion control, stable motion, and increased motion speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
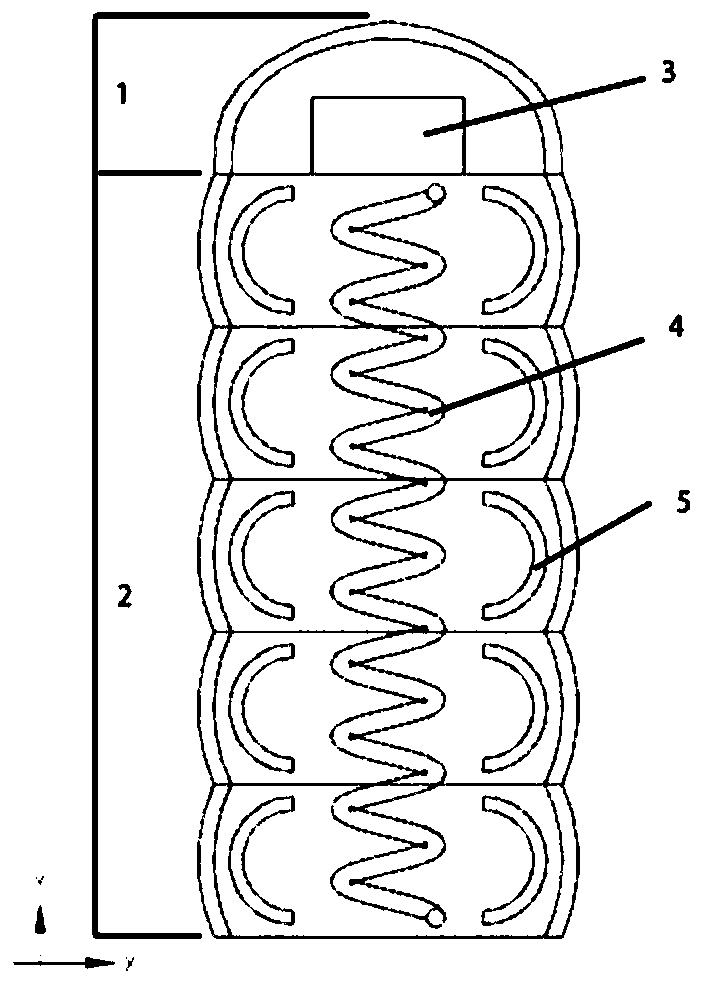
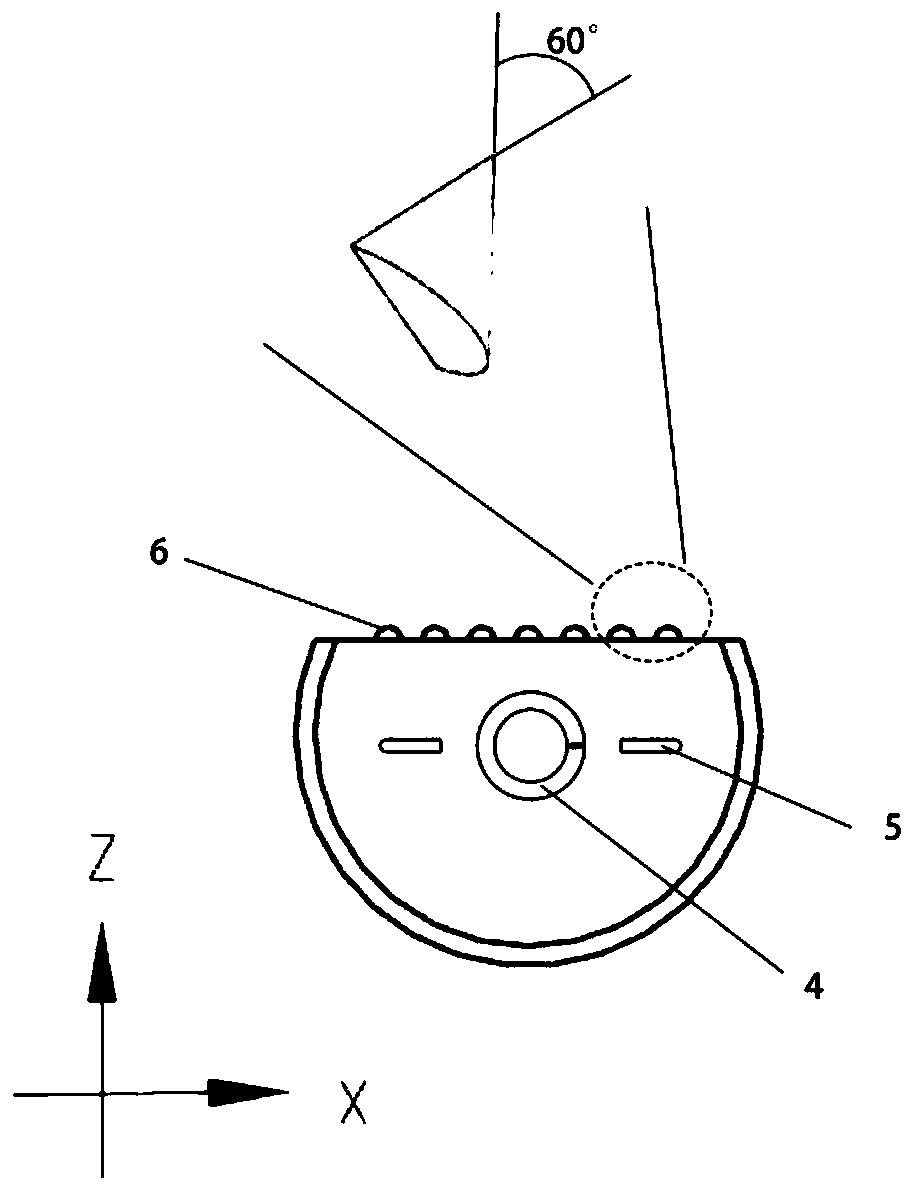
[0039] Example 1 as Figure 4 and Figure 5As shown, the spinal moving body 4 is a single spring located in the central part, and the expansion and contraction direction of the single spring is the same as the Y direction. The U-shaped muscle moving body 5 is distributed on the left and right sides of the spine moving body, and is distributed linearly along the Y direction; the opening of the left U-shaped muscle moving body 9 faces the positive direction of the X-axis, and the opening of the right U-shaped muscle moving body 10 faces the X-axis Negative direction: the openings of the left U-shaped muscular body 9 and the right U-shaped muscular body 10 are energized and deformed in the same direction as the Y direction. When the temperature of the U-shaped muscle moving body 5 reaches 60° C. and above, the U-shaped opening becomes larger; when the temperature drops to 40° C. and below, the U-shaped opening returns to its original shape.
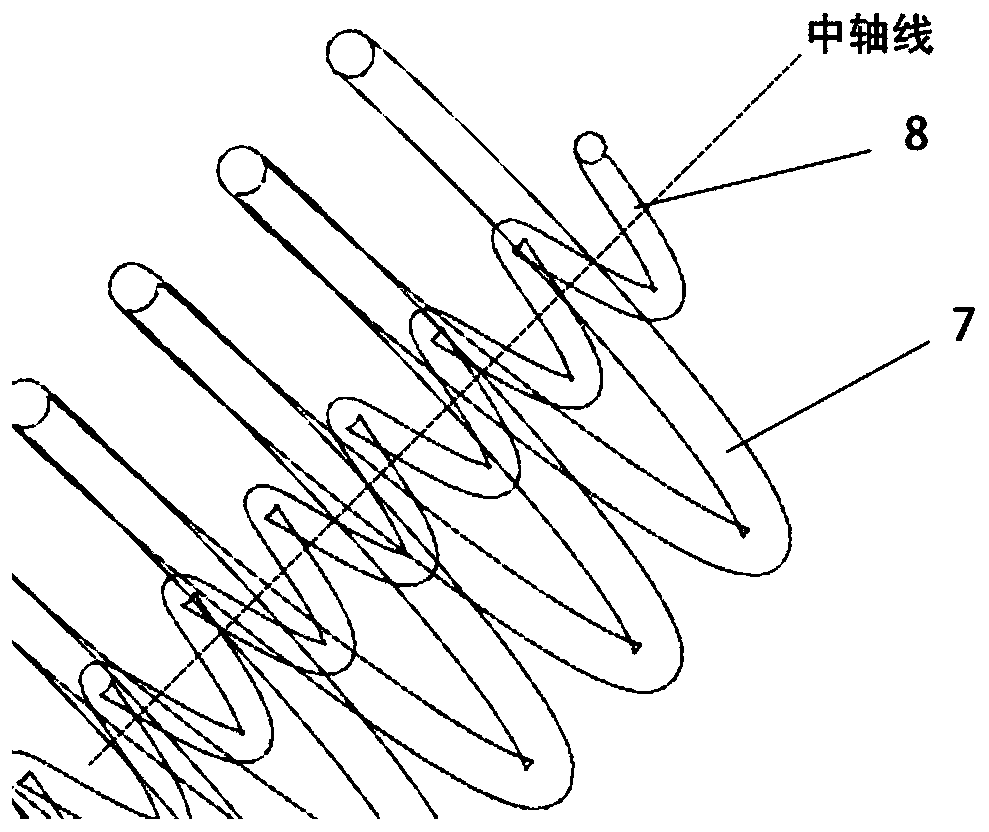
[0040] Such as Figure 8 as shown ...
Embodiment 2
[0042] Example 2 as Figure 6 and Figure 7 As shown, the U-shaped muscle movement body 5 is distributed in the four directions of the spine movement body, up, down, left, and right, and is distributed linearly along the Y direction; the opening of the upper U-shaped muscle movement body 11 faces the positive direction of the Z axis, and the lower U-shaped muscle movement body 12. The opening of the left U-shaped muscle movement body 9 faces the positive direction of the X-axis, and the opening of the right U-shaped muscle movement body 10 faces the negative direction of the X-axis; the opening of the U-shaped muscle movement body is energized. same direction. The lower U-shaped muscle moving body 12 is powered on, and the upper U-shaped muscle moving body 11, the left U-shaped muscle moving body 9 and the right U-shaped muscle moving body 10 are powered off, so that the robot can complete the upward bending action, that is, the head-raising action The upper side U-shaped mu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More