

Training method of vehicle path transformation model and path transformation method and device
A technology for transforming models and vehicle paths, which is applied in the training field of vehicle path transformation models, and can solve problems such as large computational complexity, unsuitable real-time application processes, and inability to enumerate trajectories.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
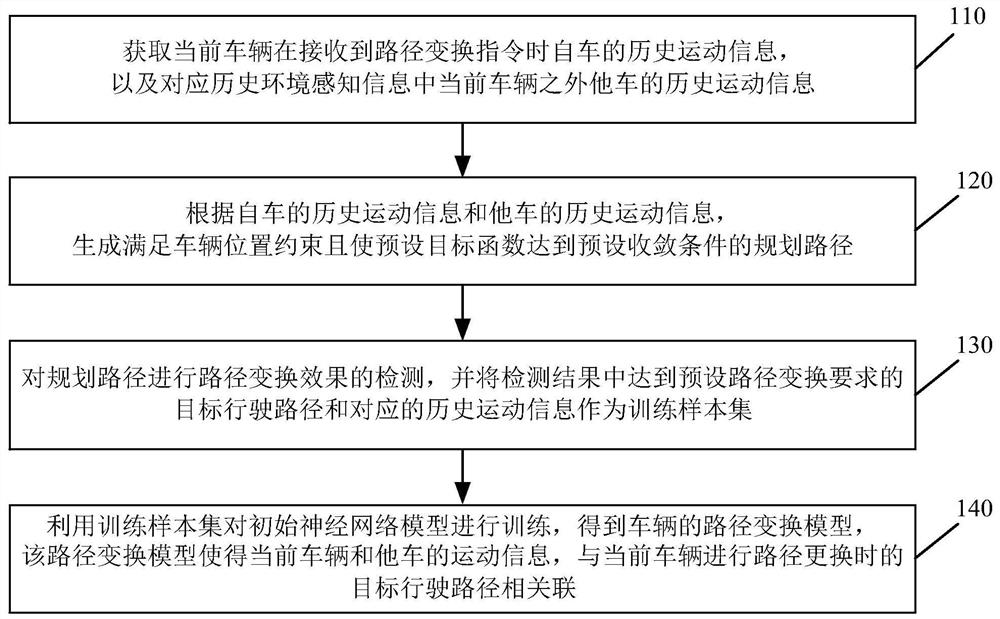
[0091] see figure 1 , figure 1 It is a schematic flowchart of a training method for a vehicle path transformation model provided by an embodiment of the present invention. The method is applied in automatic driving, and can be executed by a training device for a vehicle path transformation model. This device can be realized by means of software and / or hardware, and can generally be integrated in a vehicle-mounted computer, a vehicle-mounted industrial personal computer (IPC), etc. In the vehicle-mounted terminal, the embodiments of the present invention are not limited. Such as figure 1 As shown, the method provided in this embodiment specifically includes:
[0092]110. Acquire the historical motion information of the own vehicle when the current vehicle receives the path change instruction, and the historical motion information of other vehicles other than the current vehicle in the corresponding historical environmental perception information.
[0093] Wherein, the path ...
Embodiment 2
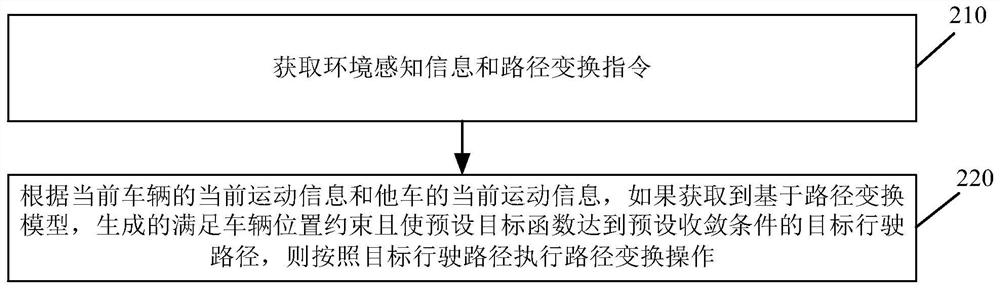
[0113] see image 3 , image 3 It is a schematic flowchart of a vehicle path changing method provided by an embodiment of the present invention. In this embodiment, on the basis of the path transformation model constructed in the above-mentioned embodiments, the path transformation model is applied to the actual driving process of the vehicle. It can be implemented in a manner, and generally can be integrated in a vehicle-mounted terminal such as a vehicle-mounted computer, a vehicle-mounted industrial personal computer (IPC), etc., which is not limited in the embodiment of the present invention. Such as image 3 As shown, the method includes:
[0114] 210. Acquire environment perception information and path transformation instructions.
[0115] Wherein, the environmental perception information includes current motion information of other vehicles other than the current vehicle, and the current motion information includes: speed, position and acceleration. The path change...
Embodiment 3
[0123] see Figure 4 , Figure 4 It is a schematic structural diagram of a training device for a vehicle path transformation model provided by an embodiment of the present invention. Such as Figure 4 As shown, the device includes: historical motion information acquisition module 310, planning path generation module 320, training sample set generation module 330 and path transformation model establishment module 340; wherein,
[0124] The historical movement information acquisition module 310 is configured to acquire the historical movement information of the own vehicle when the current vehicle receives the path change instruction, and the historical movement information of other vehicles other than the current vehicle in the corresponding historical environment perception information, the history Motion information including velocity, position and acceleration;
[0125] The planned route generation module 320 is configured to generate a planned route that satisfies the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More