

A high-sensitivity obstacle avoidance system and method for an AGV robot
A high-sensitivity, robotic technology, applied in the field of AGV robots, can solve problems such as inability to avoid obstacles, failure of obstacle avoidance sensors, etc., and achieve the effect of avoiding information delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments It is some embodiments of the present invention, but not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0064] Accordingly, the detailed description of the embodiments of the invention, which is provided in the following figures, is not intended to limit the scope of the claimed invention but merely represents selected embodiments of the invention.
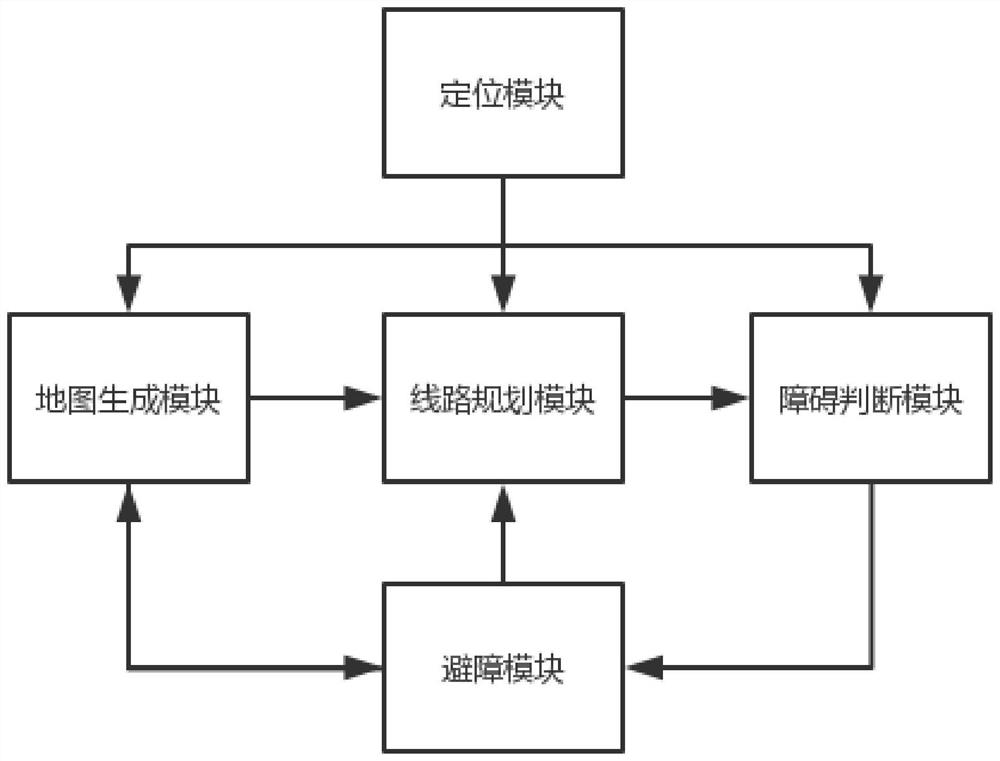
[0065] Such as figure 1 Shown, a kind of high-sensitivity obstacle avoida...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More