

Magnetorheological conformable clamp holder and robot for picking multiple types of fruits and vegetables
A picking robot and multi-type technology, applied in the direction of picking machines, chucks, manipulators, etc., can solve the problems of changing picking objects, inconvenient implementation and application, poor versatility, etc., and achieve fast picking speed, simple and feasible structure, and high picking efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
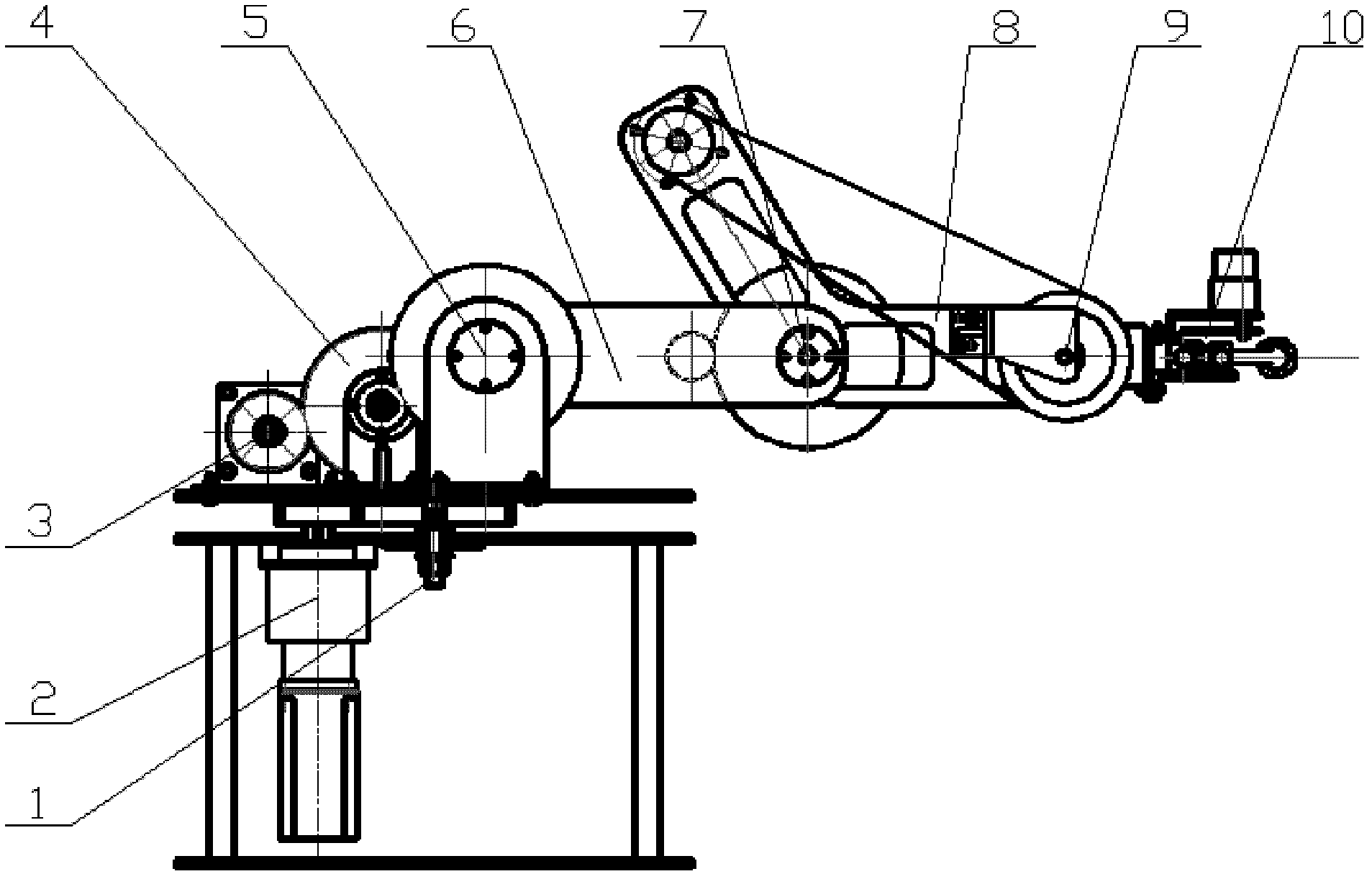
[0023] Such as figure 1 As shown, a multi-type fruit and vegetable picking robot includes a workbench, a manipulator and an end effector 10 arranged at the end of the manipulator.
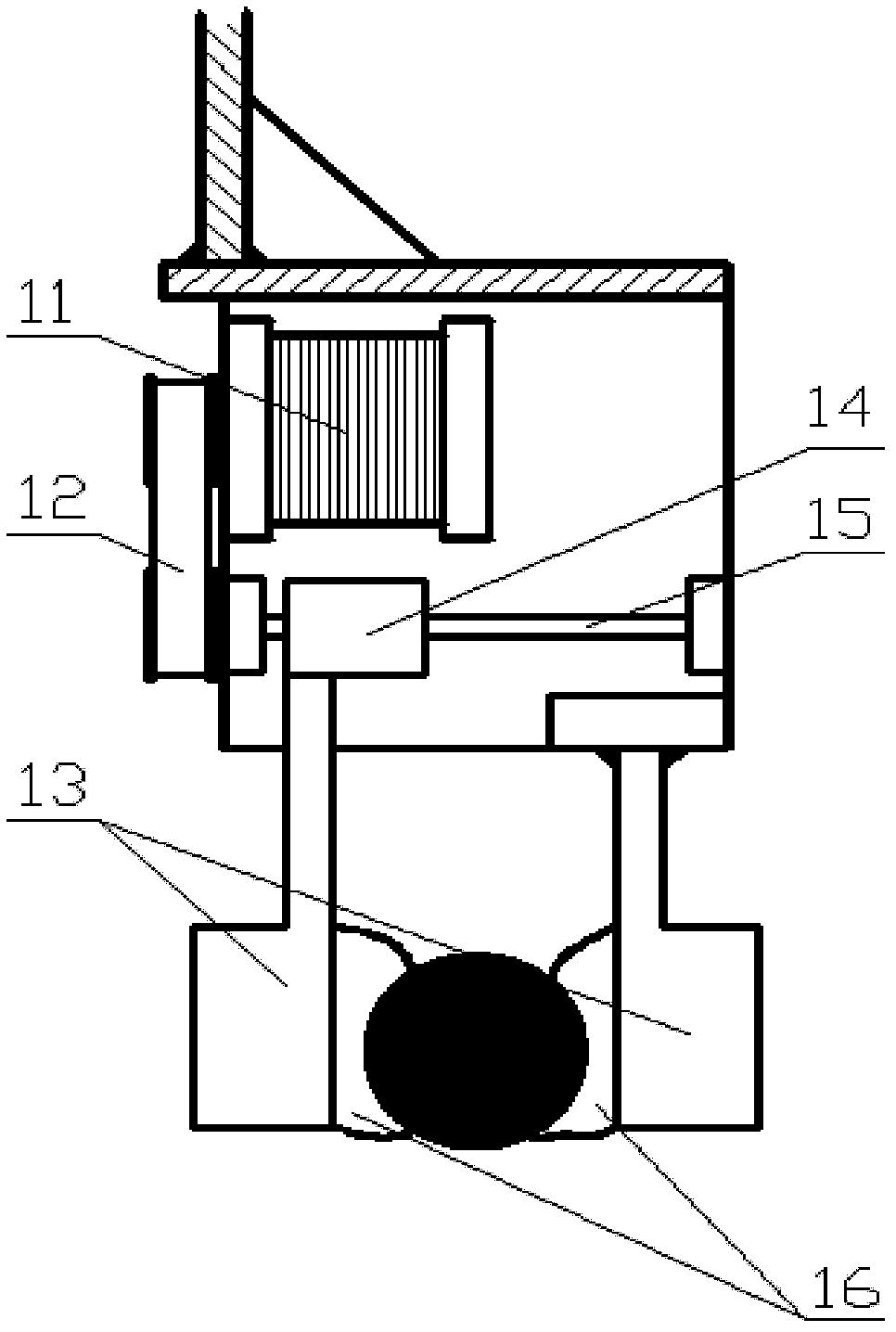
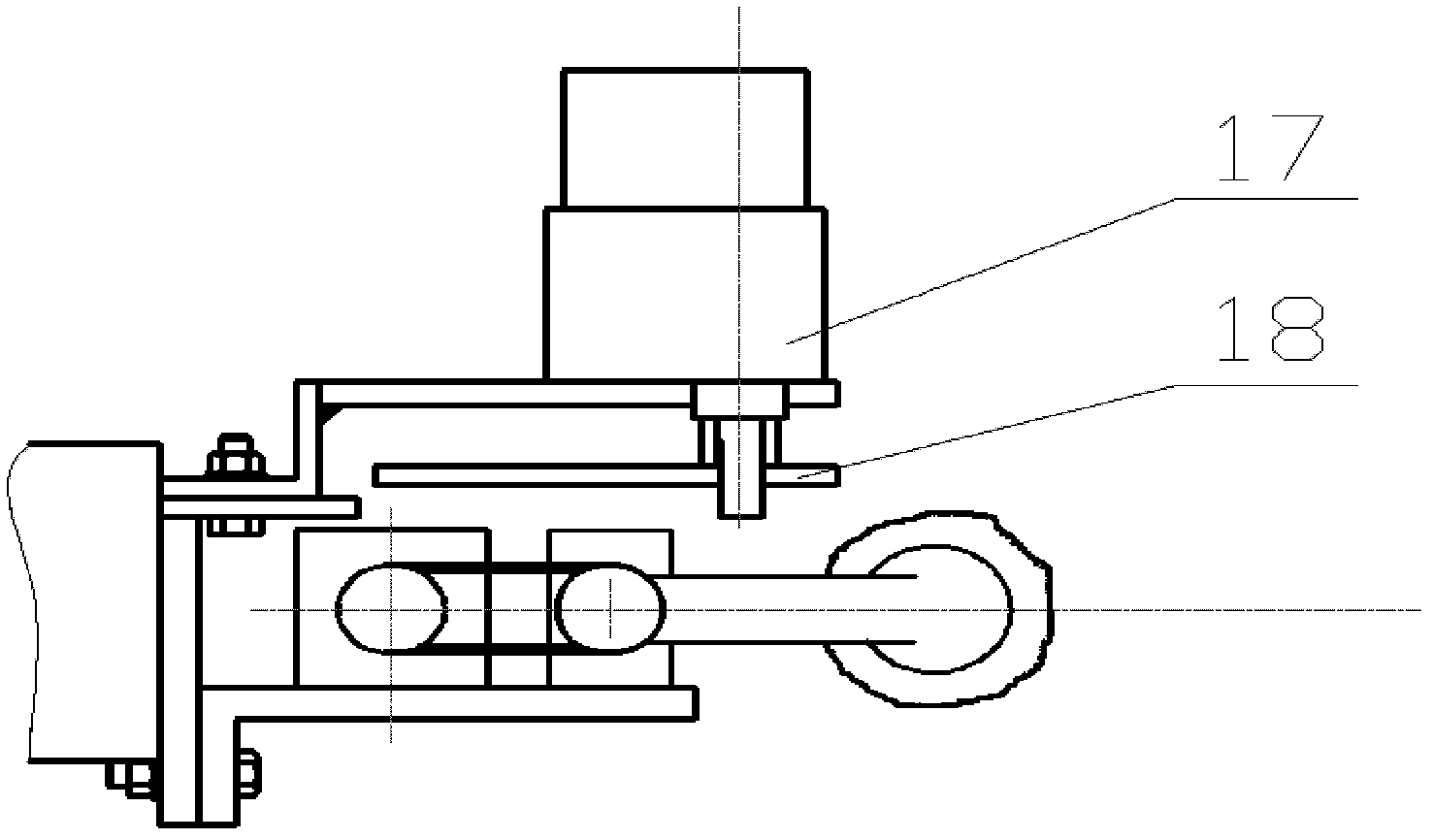
[0024] The end effector 10 consists of a magneto-rheologically compliant gripper and a shearing mechanism. Such as figure 2 As shown, the magneto-rheological suitable holder includes two clamping handles 13, a magnetorheological fluid bag 16, a housing 15 and a clamping handle translation mechanism; the clamping handle translation mechanism is composed of a stepper motor 11, a timing belt 12 Composed of ball screw 14, the stepper motor 11 drives the translational movement of the ball screw 14 through the synchronous belt 12; one end of the clamping handle 13 is arranged inside the clamper housing 15, and is connected with the ball screw of the clamping handle translation mechanism The rods 14 are connected, and the clamping handle 13 moves close to the target fruit and vegetable through the tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More