

Pelvis mechanism for gait rehabilitation training
A rehabilitation training and pelvic technology, which is applied to the training equipment for adjusting coordination, the training equipment for adjusting the cardiovascular system, and the equipment for passive exercise, etc. Simple structure and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
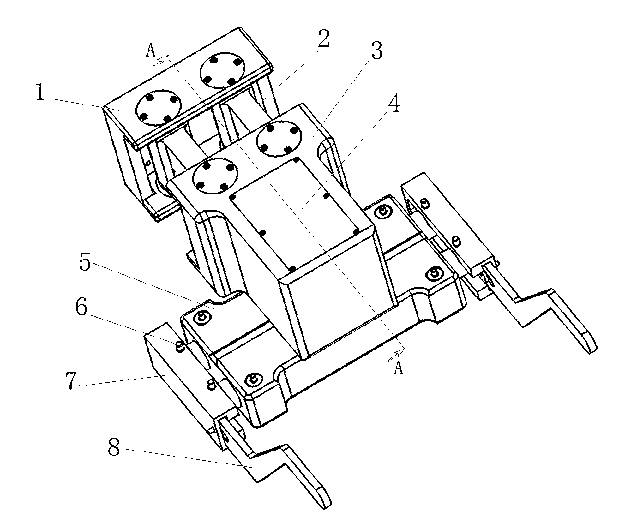
[0017] see attached figure 1 , a pelvic mechanism for gait rehabilitation training, comprising a base (1), two rockers (2), a connection box (3), a cover plate (4), a swing piece (5), Four extension shafts (6), two support plates (7) and two support arms (8); characterized in that: the rocker (2) is connected to the connection box (3) and the base (1). ) hinged, the cover plate (4) is covered on the connection box (3), the swing piece (5) is located below the lower part of the connection box (3) and is movably connected with the connection box (3), the swing piece (5) There are two adjustable extension shafts (6) on both sides of ), the extension shafts (6) are fixedly connected by a support plate (7) and a support arm (8); the base (1) is connected with the robot, It can move up and down along the column of the robot to realize the degree of freedom of up and down movement at the pelvis; the connection box (3) can be swayed left and right around the base (1) through the rock...
Embodiment 2
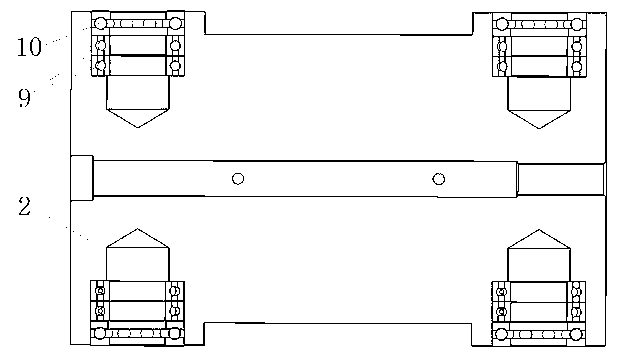
[0019] see attached figure 2 and attached image 3 , this embodiment is basically the same as the first embodiment, the special feature is that the rocker (2) is hinged with the connection box (3) and the base (1) as follows: the rocker (2) ) has a hole up and down at both ends of the The rotating shaft fixed on the connection box (3) is rotated to reduce friction, and the thrust ball bearing (10) is used to bear the force in the vertical direction.
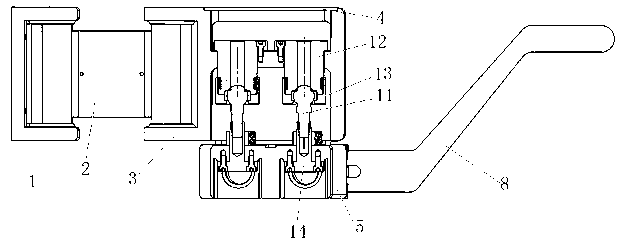
[0020] The structure in which the swing piece (5) is movably connected with the connection box (3) is: the swing piece (5) is connected with the connection box (3) through two joint bearings (11), and the upper end of the joint bearing (11) passes through A joint bearing seat (12) and a joint bearing sleeve (13) are fixed together with the connection box (3), the lower end is connected with the swing piece (5) through a locking bolt (14), and the joint bearing (11) can be wound around the center It rotates on all sides to rea...
Embodiment 3
[0023] This embodiment is basically the same as Embodiment 1 and Embodiment 2. The special feature is that: during training, the therapist assists the patient to wear the safety belt fixed to the end of the support arm (8) on the hip, and the support arm (8) is clamped on the hip. On both sides of the patient's pelvis, the patient performs various walking modes such as flat ground, steps, ramps, obstacles, etc. according to the rehabilitation needs. During the training process, the patient can move his body freely, and the pelvis needs to move up and down, left and right, and twist. , roll and pitch three rotations, the structural design of the present invention can ensure that the freedom of movement of the patient's pelvis is not restricted, the patient is training the balance ability while training the walking function of the legs, and ensures the safety of the patient and accelerates recovery process.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More