

Multi-manipulator synchronous control experimental platform and experimental method
A synchronous control and experimental platform technology, applied in the direction of electrical testing/monitoring, etc., can solve problems such as inability to complete synchronous control, coordinated control or consistent control network control algorithm testing, lack of openness and versatility, and achieve flexible design and low cost. Low, high versatility effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Figure 1~7 It is the best embodiment of the present invention, below in conjunction with attached Figure 1~7 The present invention will be further described.
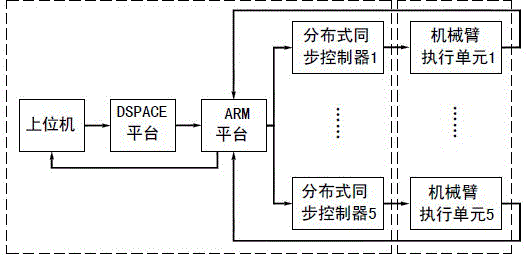
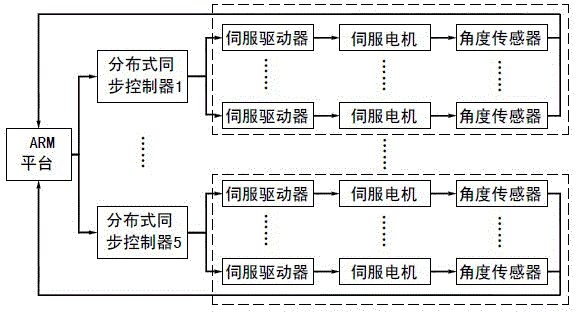
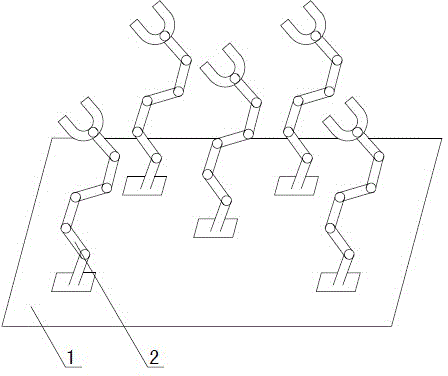
[0071] Such as Figure 1~Figure 2 As shown, the multi-manipulator synchronous control experiment platform of the present invention includes a simulation control unit and an execution unit connected to the simulation control unit to realize the synchronization control algorithm of the simulation control unit.
[0072] The simulation control unit includes host computer, DSPACE platform, ARM platform and multiple distributed synchronous controllers. The upper computer is connected with the DSPACE platform, the DSPACE platform is connected with the ARM platform, the ARM platform is connected with multiple distributed synchronous controllers at the same time, and the ARM platform is directly connected with the upper computer at the same time. The executing unit is a mechanical arm executing unit connected with ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More