

Vehicle-pedestrian collision avoidance method and system in vehicle-road collaborative environment
A vehicle-road coordination and collision avoidance technology, which is applied in the field of intelligent transportation, can solve the problems that the walking direction of pedestrians is difficult to fit through functions, does not consider the lateral distance between pedestrians and vehicles, and does not consider the various driving states of vehicles, etc., so as to reduce calculations The effect of workload, broadening the source of hazard information, and reducing the number of collision avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
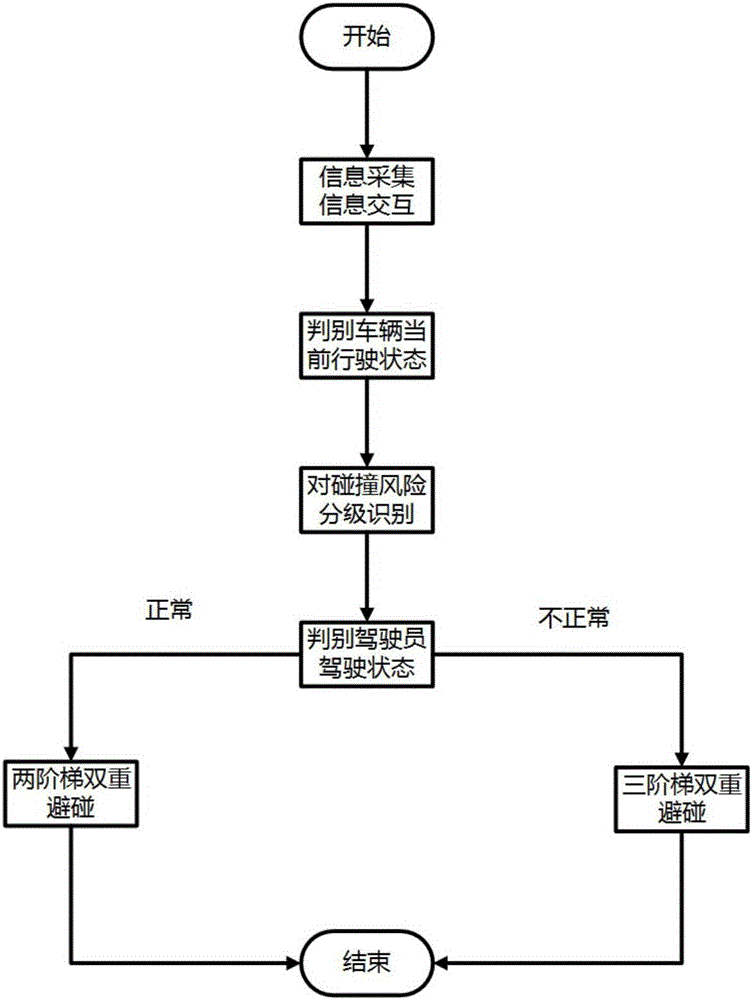
[0062] Such as figure 1 As shown, the vehicle-pedestrian collision risk identification and decision-making method described in the present invention is divided into the following steps:
[0063] 1) Information collection: collect information for identifying collision risks; the information includes vehicle speed information, acceleration information, location information, and the number, location, and road information of pedestrians;
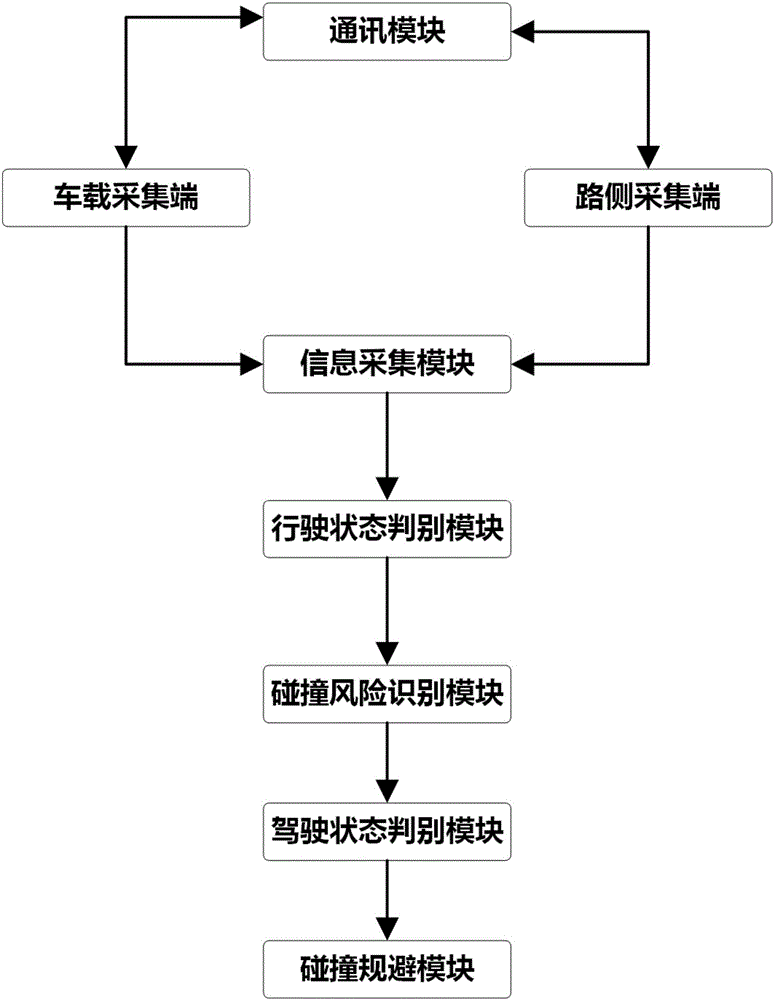
[0064] Among them, information collection uses vehicle-mounted collection terminals and roadside collection terminals;
[0065] The vehicle-mounted acquisition terminal uses cameras, infrar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More