

Welding construction method using multi-degree-of-freedom rocker arm type movable connecting rod mechanism
A link mechanism and rocker arm technology, applied in the field of robotics, can solve the problems of small working space, large torque required, and low rigidity, and achieve the effect of improving the working space, reducing the active moment, and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
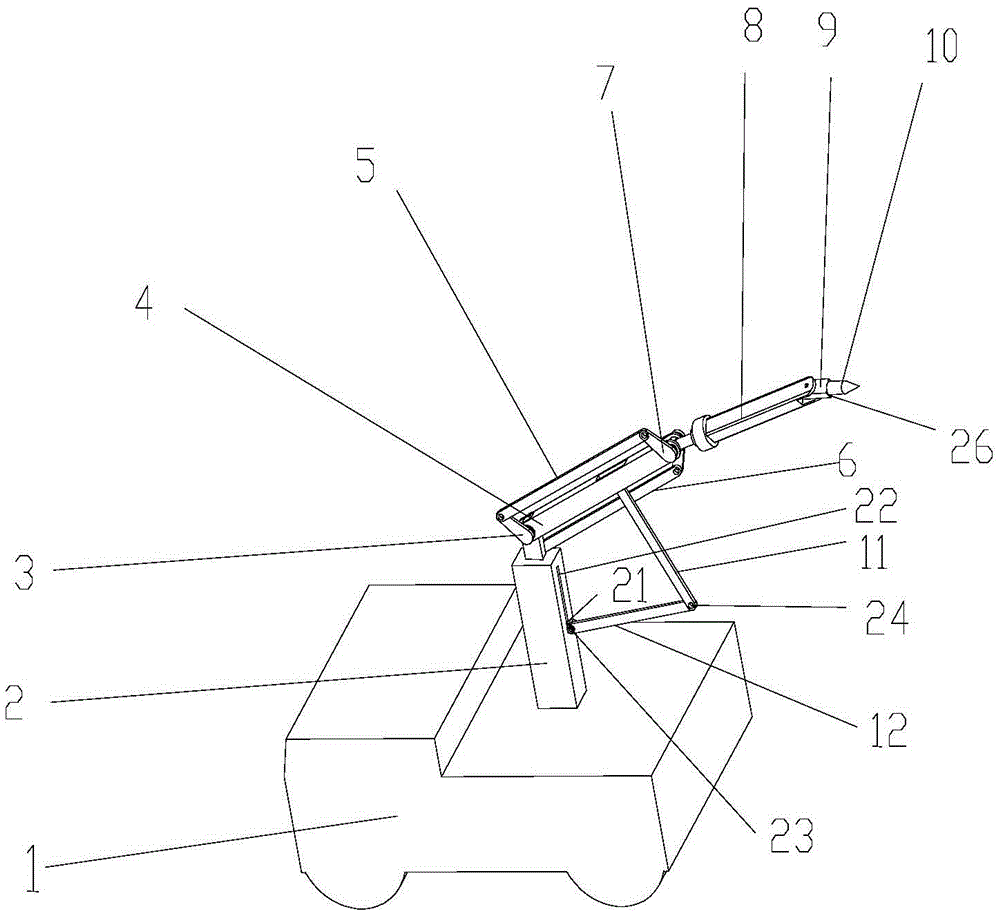
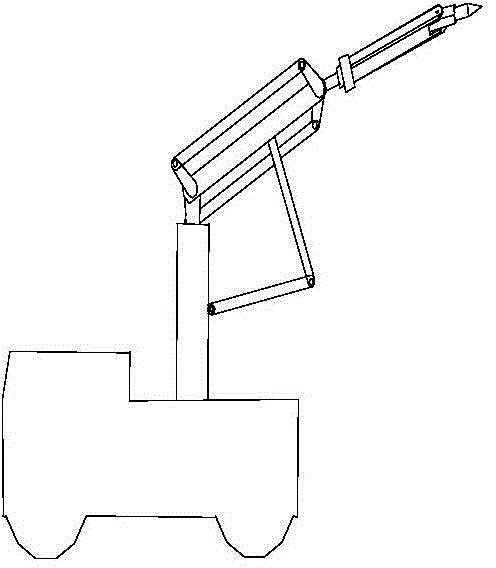
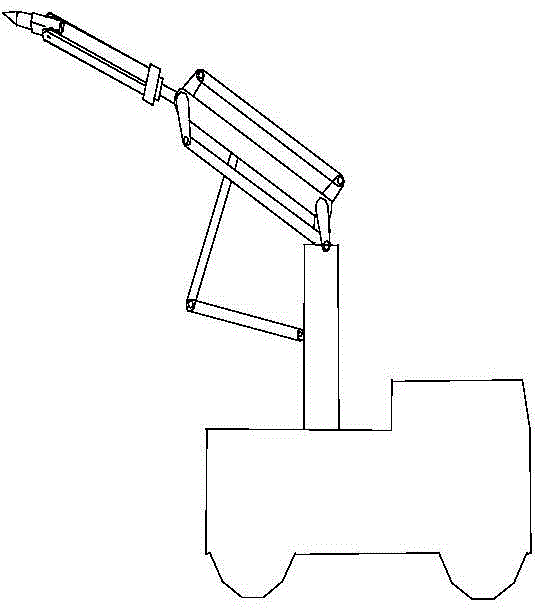
[0028] Such as Figure 1-Figure 12 As shown, a method of welding construction using a multi-degree-of-freedom rocker-arm mobile linkage mechanism, first connect and install the welding car according to the following connection method:
[0029] The bottom end of the column 2 is connected to the car body 1 through a fixed pair, and the top end of the column 2 is respectively connected to the first connecting end of the main arm 4 and the first connecting end of the first rocker arm 3 through the first rotating pair 13. The second connecting end of the arm 3 is connected to one end of the first connecting rod 5 through the second rotating pair 14, and the other end of the first connecting rod 5 is connected to the second connecting end of the second rocking arm 7 through the fourth rotating pair 17. The first connecting end of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More