

Adaptive error symbol integration robust repetitive control method for electromechanical servo system
An electromechanical servo system, error sign technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of noise sensitivity, high bandwidth, and affecting system tracking performance, etc., to reduce the sensitivity of noise, The effect of excellent performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
[0017] combine Figures 1 to 2 The self-adaptive error symbol integral robust repetitive control method of the electromechanical servo system of the present invention comprises the following steps:
[0018] Step 1, establish the mathematical model of the electromechanical servo system;
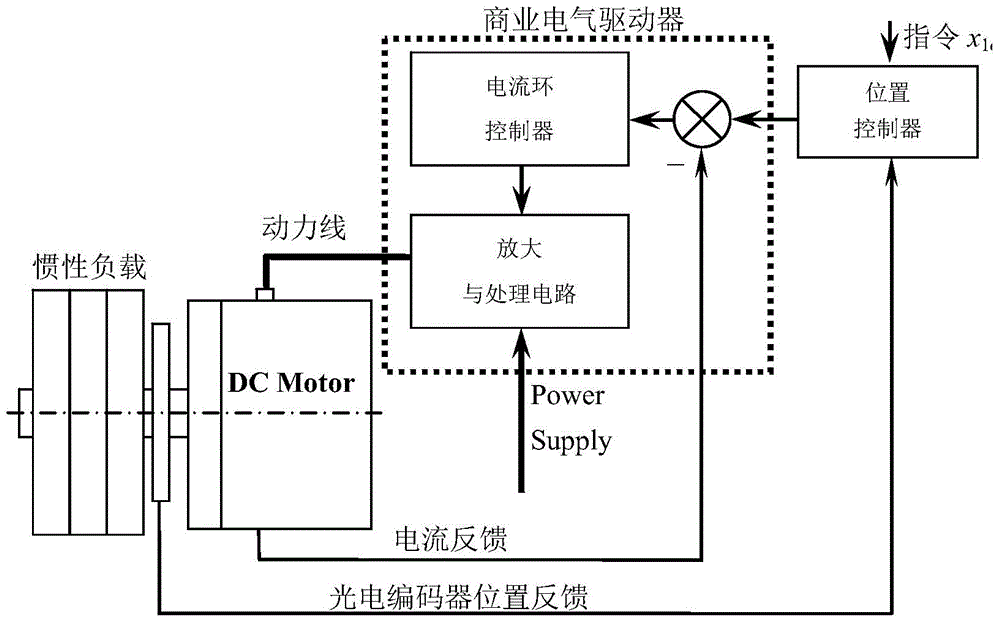
[0019] (1.1) The electromechanical servo system considered in the present invention is to directly drive the inertial load through a permanent magnet DC motor equipped with a commercial electric driver. The schematic diagram is as follows figure 1 shown. Considering that the electromagnetic time constant is much smaller than the mechanical time constant, and the speed of the current loop is much greater than the response speed of the speed loop and the position loop, the current loop can be approximated as a proportional link.
[0020] Therefore, acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More