

Slave end controller of interventional operation assisting system with catheter-guide wire conducting collaborative operation
A technology for interventional surgery and auxiliary system, which is applied in the field of the slave end controller of the interventional surgery auxiliary system for the coordinated operation of the catheter and the guide wire, which can solve the problems of catheter damage, non-ergonomic, vascular injury, etc., so as to reduce the propulsion error and improve the effect. Experience with doctors and the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in detail below with reference to the accompanying drawings and examples.
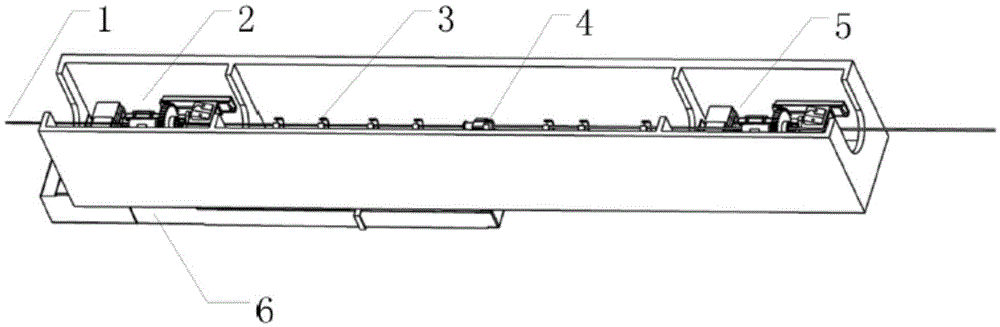
[0043] The present invention provides a slave end controller of a catheter-guide wire cooperative operation interventional operation auxiliary system, see the attached figure 1 , including: guide wire 1, guide wire manipulator 2, catheter 4, catheter manipulator 5, sliding bracket 3, axial motion controller 6 and housing 6-2;
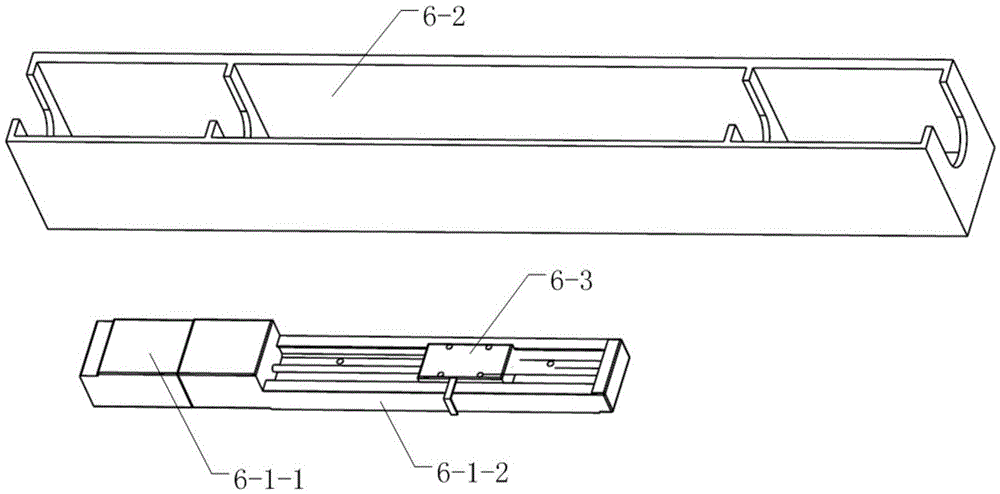
[0044] The axial motion controller 6 is used to control the axial movement of the catheter 4 and the guide wire 1 and the retraction of the catheter manipulator 5 and the guide wire manipulator 2;
[0045] The housing 6-2 is used to support the guide wire manipulator 2, the catheter manipulator 5 and the sliding bracket 3;
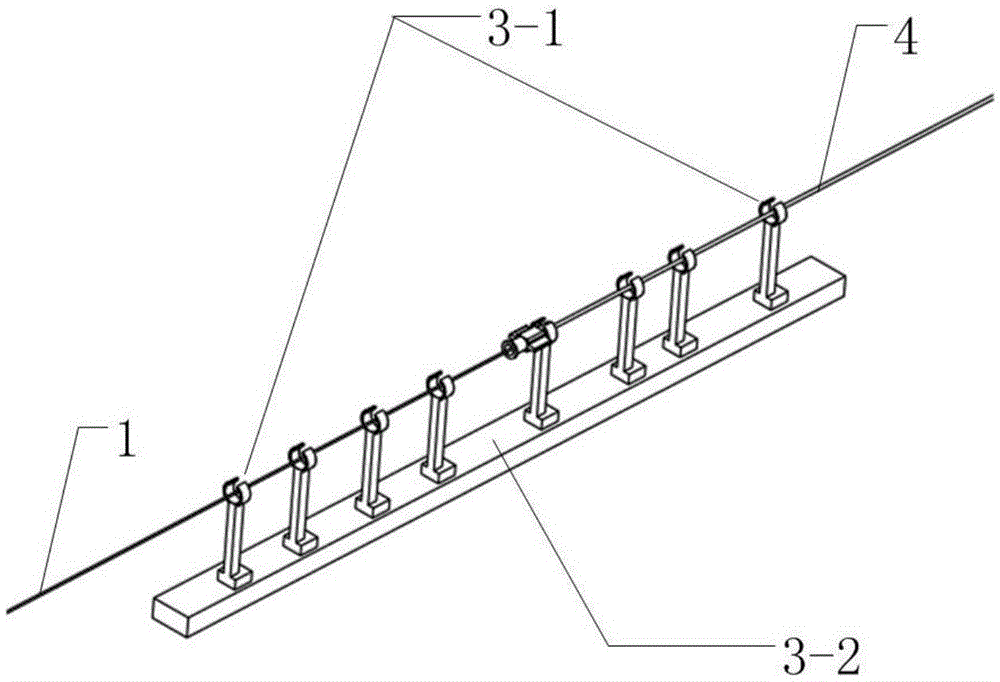
[0046] The sliding bracket 3 is used to support the guide wire 1 and the catheter 4, keep the guide wire 1 and the catheter 4 stable during the movement, and limit the movement track of the guide wire 1 before ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More