

Substation patrol robot autonomous charging method based on laser navigation
An inspection robot and autonomous charging technology, which is applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as autonomous charging, achieve flexible position design, and save construction costs and time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
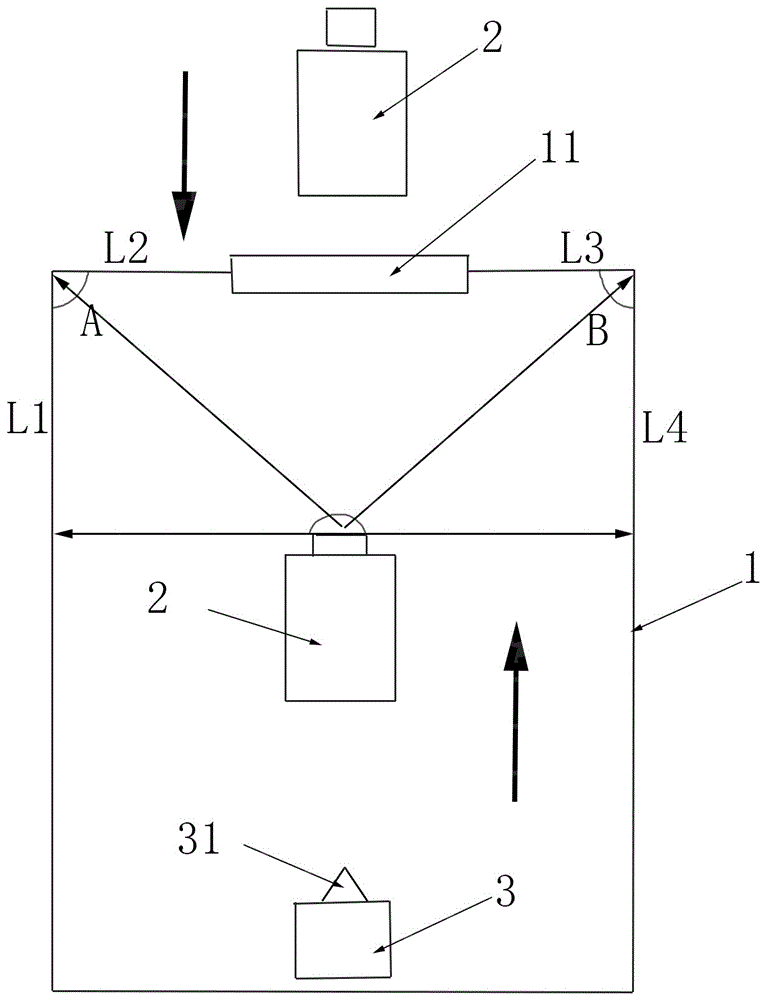
[0024] See attached picture. The inspection robot autonomous charging method described in this embodiment is used on a robot with at least a motion control system, an inertial navigation system, and a laser scanning sensor; The size data and the position of the charging pile 3 in the charging room 1 are entered into the industrial computer of the inspection robot 2; the charging room 1 is equipped with an automatic rolling door 11;
[0025] When the inspection robot 2 needs to be charged, it first returns to the front of the charging room 1, with the tail facing the house, the charging room 1 automatically opens the rolling door 11, and then the robot 2 moves back a certain distance in a straight line, so that the robot 2 enters the front half of the charging room 1, and the charging room Close the door; at the same time, robot 2 uses the laser scanning sensor to scan the wall information in front of and on both sides of the robot;
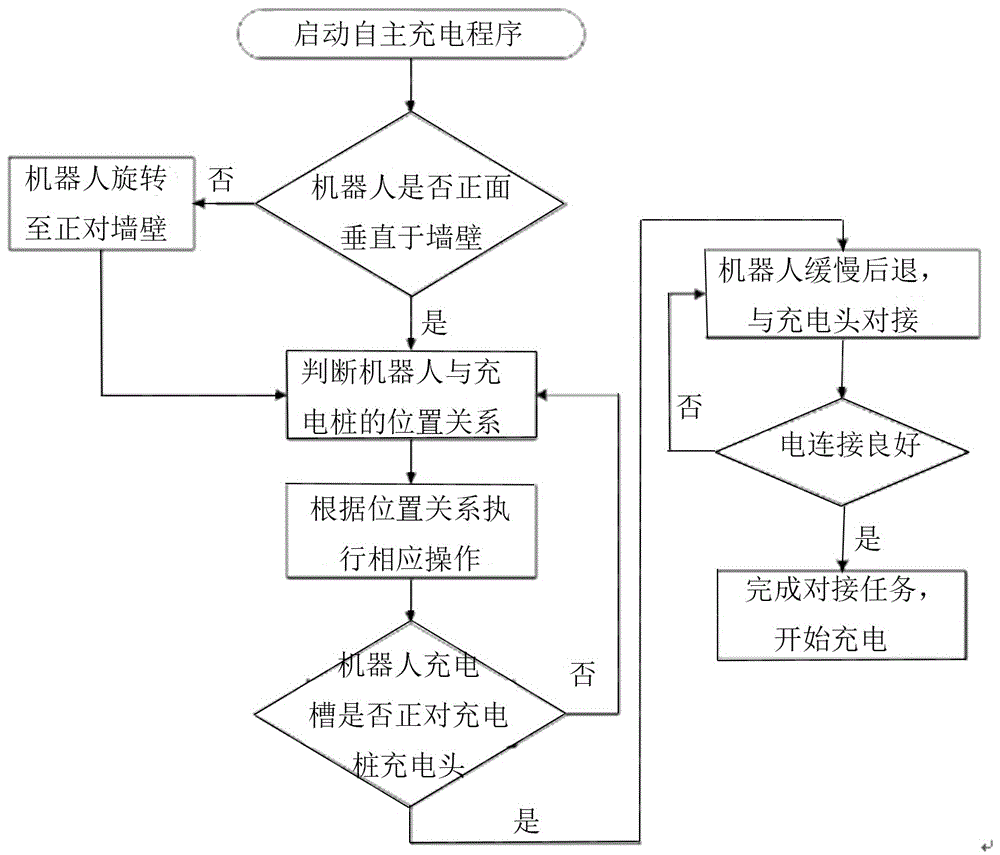
[0026] The industrial computer equipped wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More