

Deformation shock-absorption traveling part of double-worm-gear mechanism and firefighting moving platform with deformation shock-absorption traveling part
A technology of double worm gear and walking part, which is applied in the field of robots to improve terrain passability and adaptability, reduce production cost and weight, and improve shock absorption performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] Embodiments of the present invention will be described in detail below, and the embodiments described with reference to the accompanying drawings are exemplary and are only used to explain the present invention, and should not be construed as limiting the present invention.
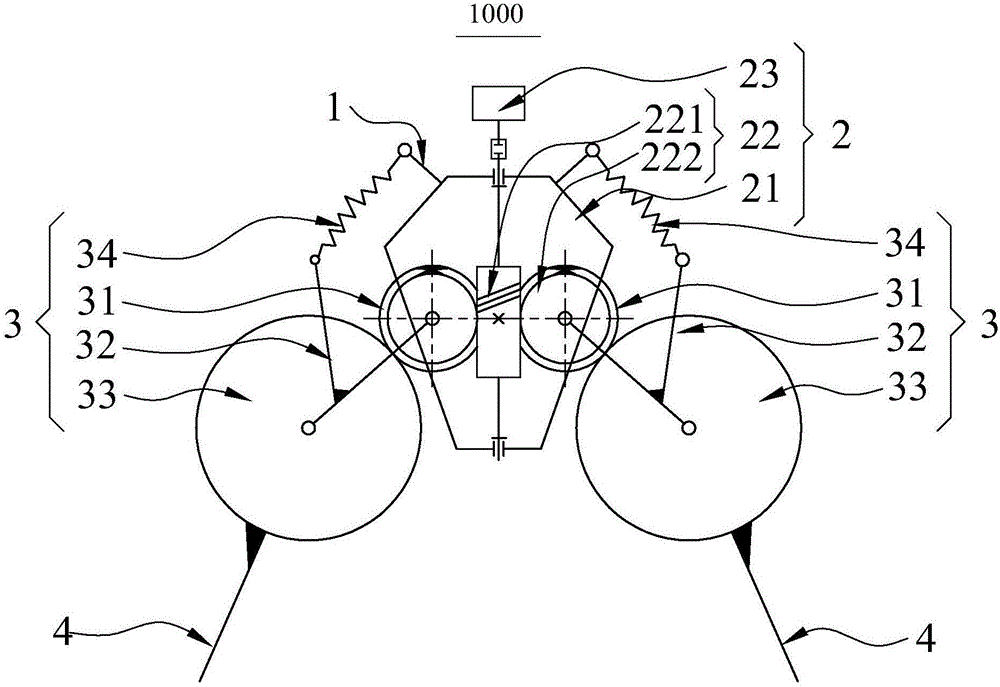
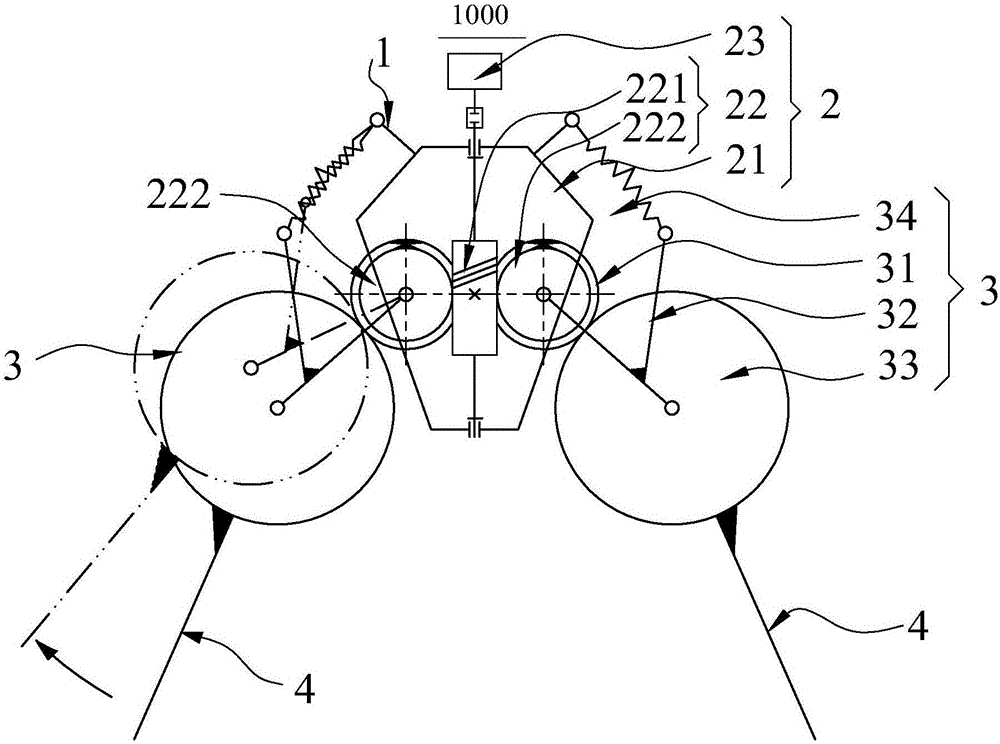
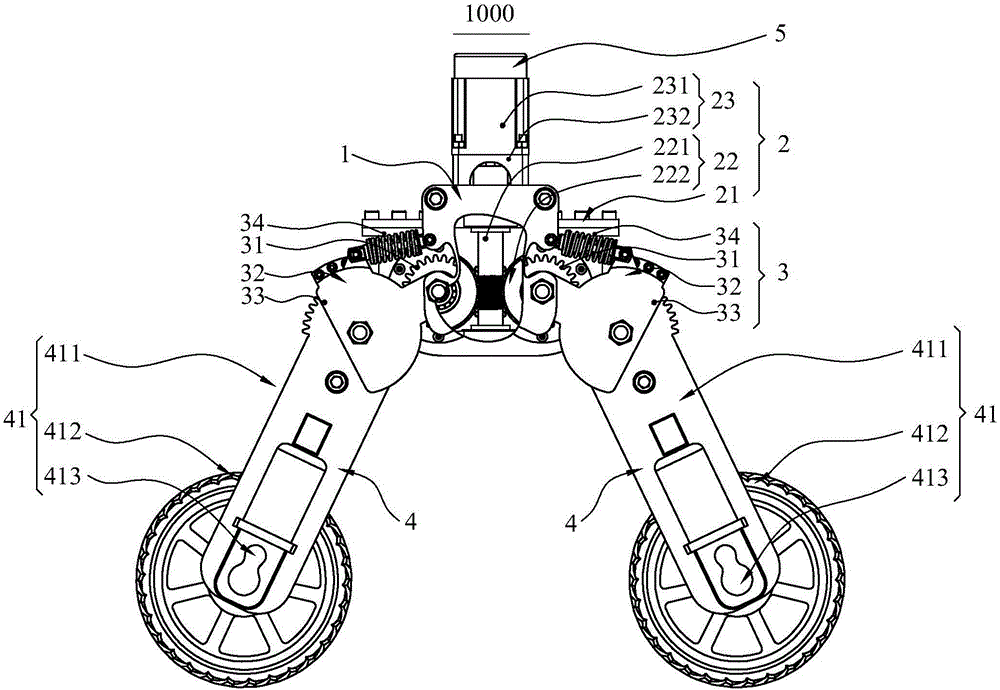
[0077] Combine below Figure 1 to Figure 15 The double worm gear mechanism deformation shock-absorbing running part 1000 according to the embodiment of the present invention is described in detail. The running part 1000 can be used for a mobile platform, but is not limited thereto.
[0078] Such as figure 1 , figure 2 It is a schematic diagram of the mechanism of the deformed shock-absorbing walking part of the double worm gear mechanism according to the embodiment of the present invention, image 3 , Figure 4 based on figure 1 The schematic diagram of the mechanism shown is a schematic diagram of the structure of the designed double worm gear mechanism with deformation and shock absorption. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More