

Barrier and travelable area detection method based on vehicle-mounted binocular camera
A technology of binocular camera and detection method, applied in computer parts, instruments, character and pattern recognition, etc., can solve the problems of high environmental requirements, weak adaptability, and low precision, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
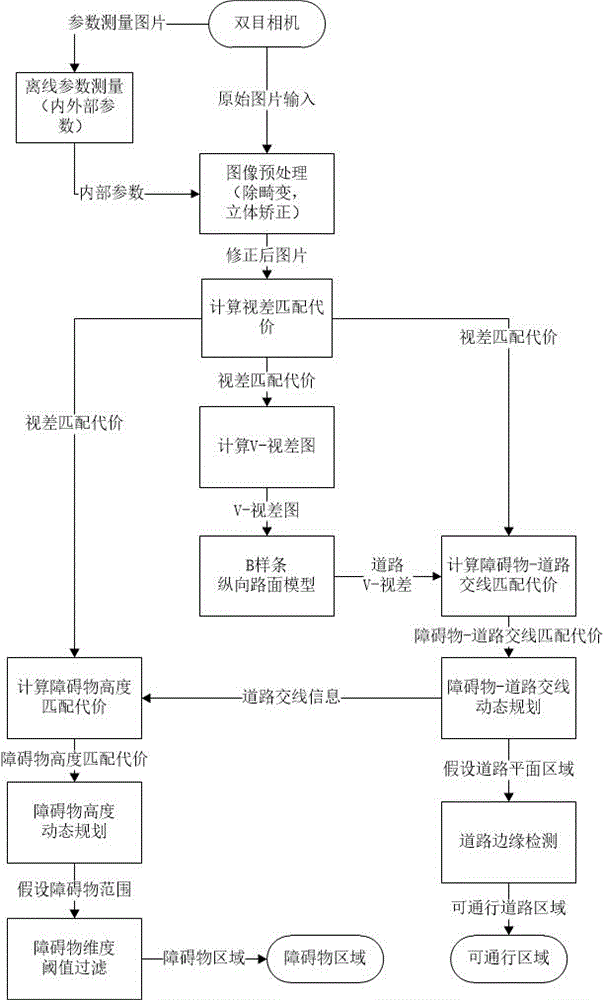
[0060] Embodiment: In this embodiment, an obstacle and drivable area detection method based on a vehicle-mounted binocular camera takes the binocular camera image as input, and the passable area and potential obstacle range as output, such as figure 1 shown, including the following steps:
[0061] 1. Obtain binocular images in RGB format.
[0062] 2. Preprocess the image, mainly including grayscale, distortion removal and stereo correction.
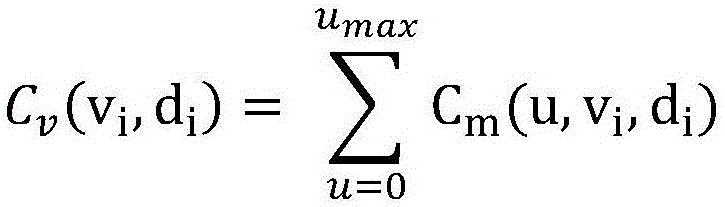
[0063] 3. For the disparity d corresponding to each pixel (u, v) in the preprocessed picture, calculate the matching cost C based on the difference of the absolute value of the gray value (SAD) v (u i ,v i , d i ), calculated as follows:
[0064] C v (u i ,v i , d i ) = img left (u i ,v i )-img right (u i -d i ,v i )
[0065] Among them, u i is the abscissa of pixel i in the image coordinate system, v i is the ordinate of pixel i in the image coordinate system, img left (u i ,v i ) is the absolute value of the gray v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More