

Plant protection unmanned aerial vehicle task route planning method and plant protection unmanned aerial vehicle
A plant protection drone and route technology, applied in the field of drones, can solve the problems of low precision coverage, mis-spraying, multi-spraying, etc., and achieve the effect of planning a comprehensive path, reducing missed spraying, and avoiding collisions with obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to enable those skilled in the art to better understand the technical solution of the present invention, the technical solution of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
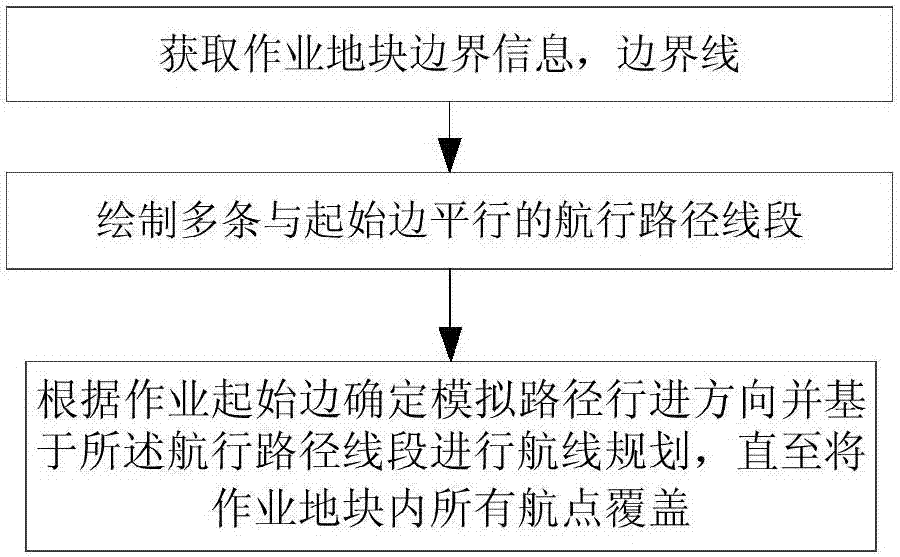
[0056] In this embodiment, a plant protection UAV operation route planning method is provided, such as figure 1 shown, including the following steps:
[0057] Obtain the boundary information of the operation plot and obtain the boundary line of the operation plot according to the boundary information of the operation plot;
[0058]Obtaining the boundary information of the operation plot refers to obtaining the geographic location information of the operation plot. The geographic location information proposed in this embodiment refers to the latitude and longitude information of the operation plot. Data information, that is, the point values of X and Y, so that the virtual operation plo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More