

A drag teaching device for humanoid manipulator
A technology of dragging teaching and robotic arms, which is applied in the field of robotics, can solve the problems of limited use process and difficulty in meeting specified operation needs, and achieve the effect of easy dragging, reduced hardware dependence, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
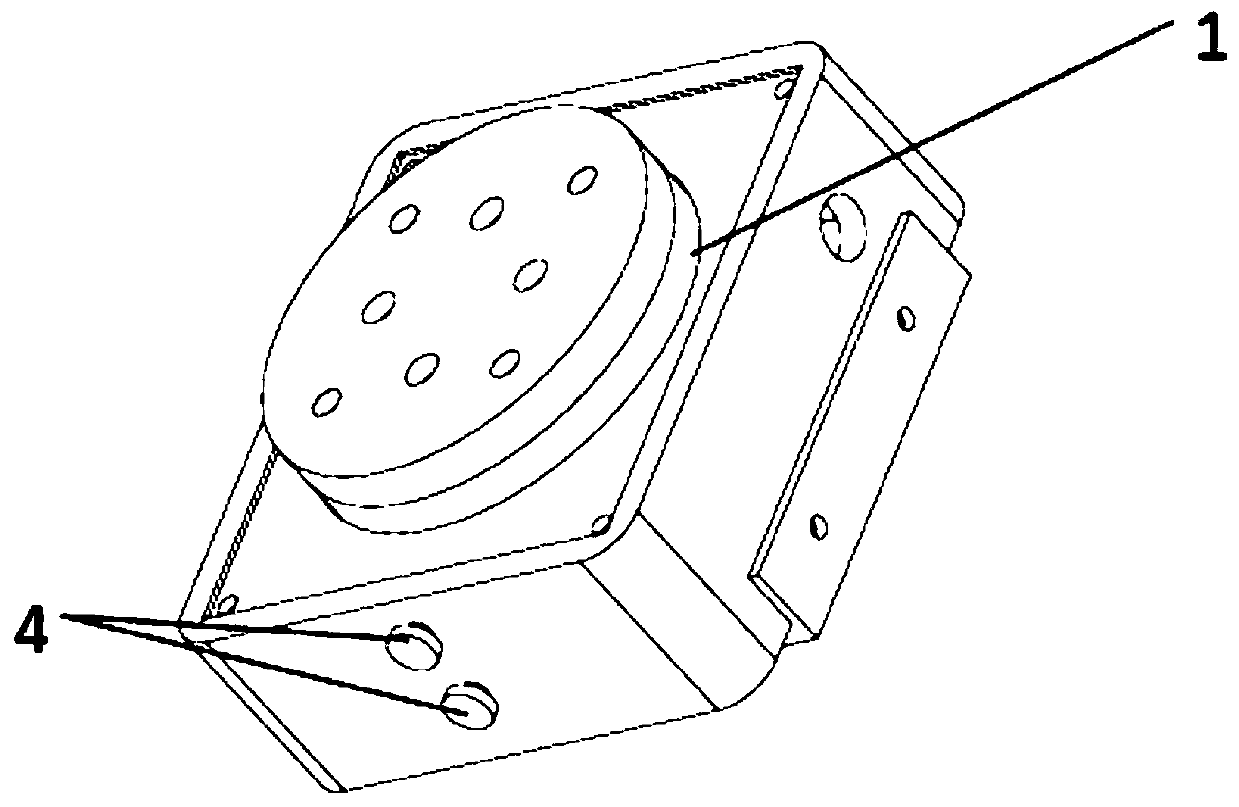
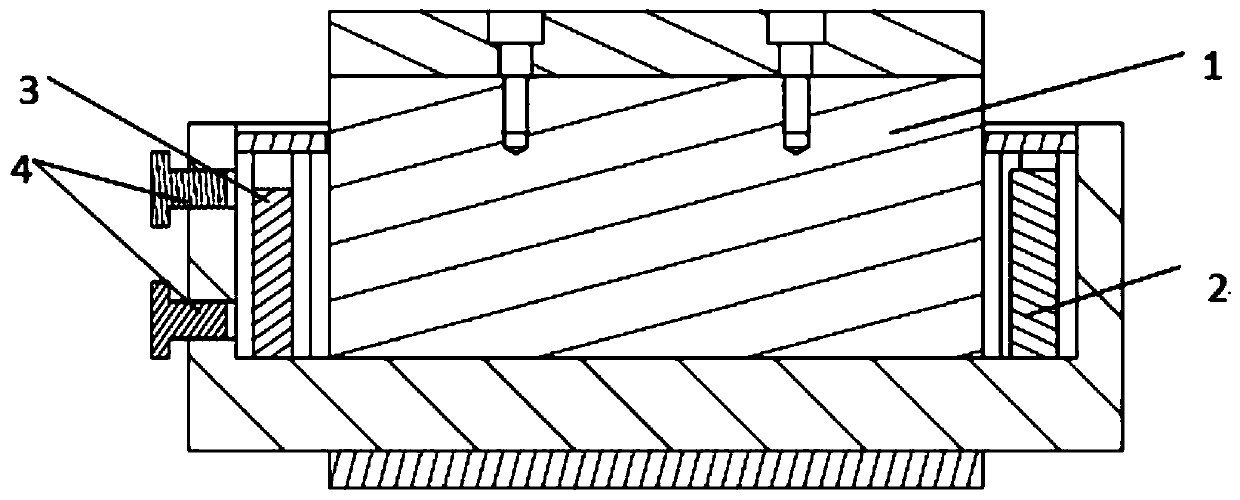
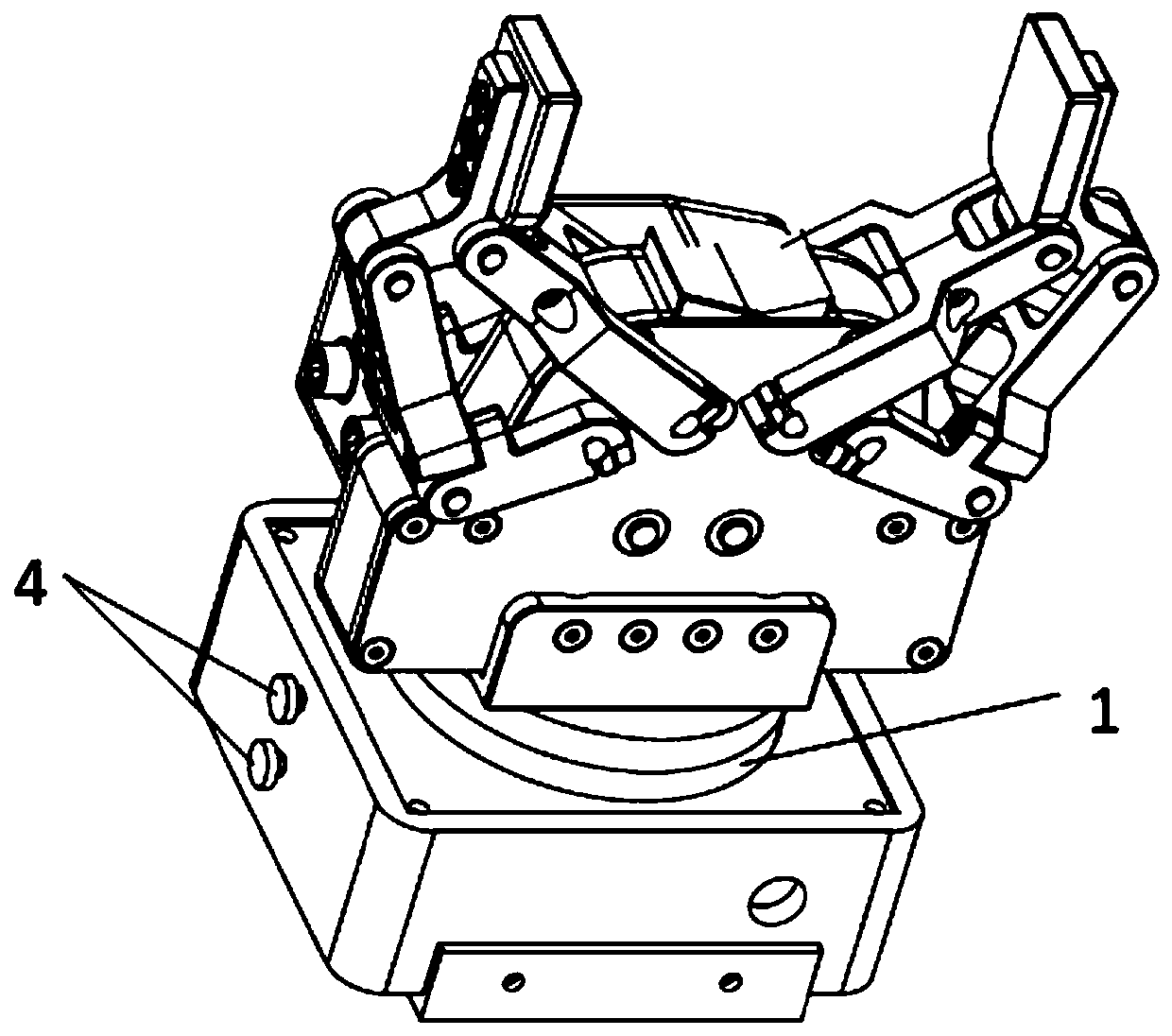
[0059] Figure 1 ~ Figure 3 The composition of the drag teaching pendant of the present invention and the partial schematic diagram of the connection between the drag teaching pendant and the end effector of the robotic arm of the robot are given. The drag teaching pendant includes a six-dimensional force sensor 1, a power supply module 2 and a teaching controller 3 , the teaching controller 3 includes a physical button 4, an IO module, a DSP chip, and a CAN bus controller.
[0060] Figure 4 It is a schematic diagram of the power supply path and signal path of the teaching pendant in the present invention. The six-dimensional force sensor 1 is used to measure the space six-dimensional force applied to the end effector of the humanoid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More