

Control device and method for attitude adjustment of underwater robot based on Boolean network
An underwater robot, Boolean network technology, applied in attitude control and other directions, can solve the problems of communication delay, real-time and accuracy requirements are difficult to meet and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
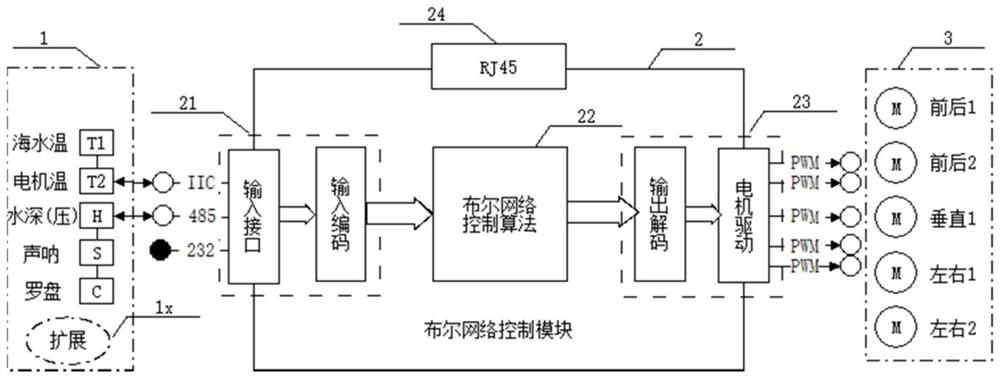
[0042] Such asfigure 1 As shown, this implementation of the underwater robot attitude adjustment control device based on the Boolean network mainly consists of three parts, the sensor 1 in the left dotted line box, the Boolean network control module 2 in the middle solid line box, and the dotted line box on the right. Actuator 3.
[0043] The sensor 1 includes a water temperature sensor T1 arranged outside the submersible shell, a temperature sensor T2 arranged on the propulsion motor, a water depth (pressure) sensor H arranged at the bottom of the submersible casing, and a full-attitude three-dimensional electronic compass heading sensor C. Sonar S on the bow; the actuator 3 includes 5 special propellers, all of which are 48VDC DC motors, of which there are 2 left and right, 2 front and rear, and 1 vertical propeller; the Boolean network control module is based on an embedded processor. The core has strong computing and storage capabilities. The schematic diagram mainly shows...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More