

Map Creation Method for Mobile Robot Based on Laser Ranging Sensor
A mobile robot and laser ranging technology, applied in the field of map creation of mobile robots, can solve the problems of poor cleaning effect, reduced cleaning efficiency, and reduced intelligence of the sweeping robot, so as to optimize the cleaning planning process and achieve high segmentation accuracy. , optimize the cleaning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
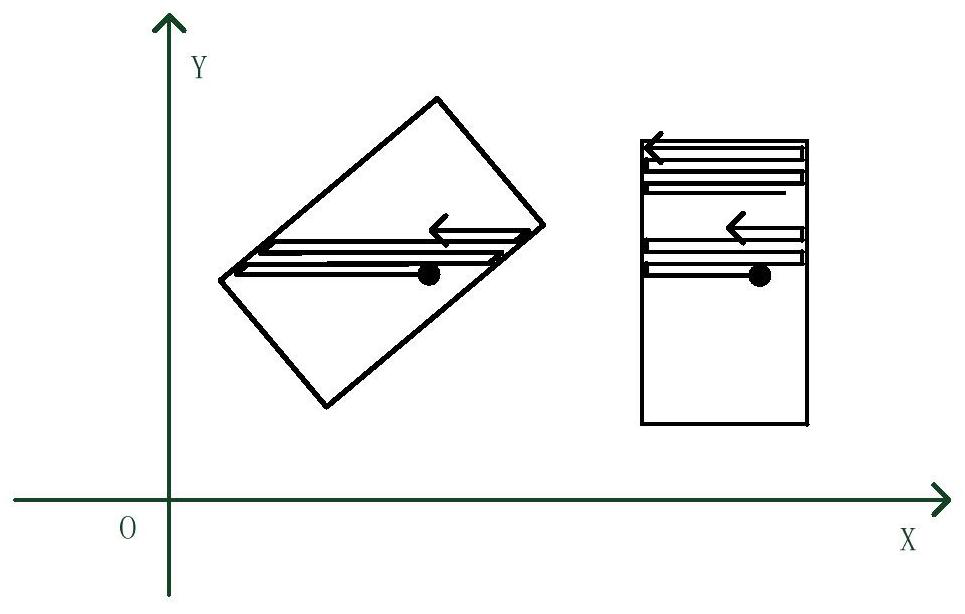
[0050] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0051] The mobile robot in the present invention is a covered robot that works in a designated enclosed area, such as a security patrol robot or a sweeping robot that works in an indoor environment, a mowing robot that works in a specific lawn area, and a cleaning robot that cleans a swimming pool.
[0052] The mobile robot in the present invention comprises a power supply module, a walking module, a sensor module and a control module, wherein the power supply ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More