

Co-simulation method and system for multi-wheel independently driven slip steer vehicle
A co-simulation and independent drive technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as research on steering characteristics of slip-steer vehicles that cannot be independently driven by multiple wheels, and achieve the goal of improving accuracy and reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions of the embodiments of the present application will be clearly and completely described below in conjunction with the drawings of the embodiments of the present application. Apparently, the described embodiments are some of the embodiments of the present application, but not all of them. All other embodiments obtained by persons of ordinary skill in the art based on the described embodiments of the present application belong to the protection scope of the present application.
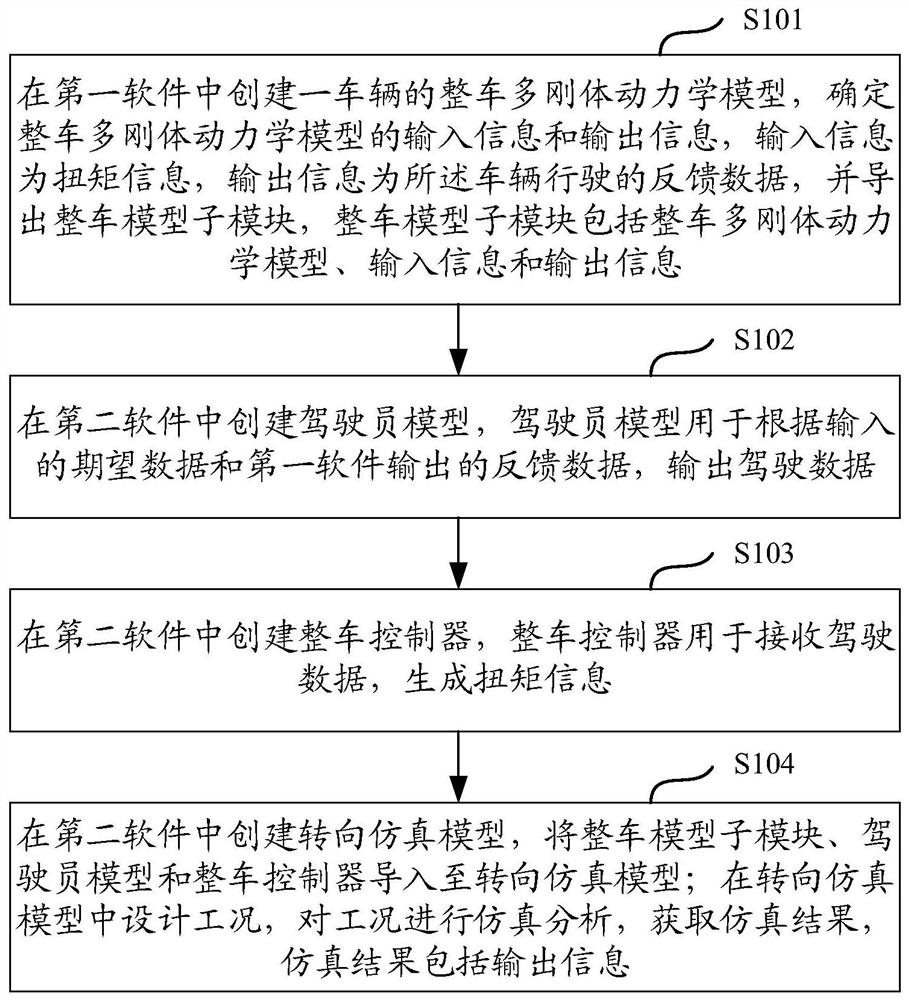
[0045] refer to figure 1 , figure 1 It is a schematic flow chart of a co-simulation method for a multi-wheel independently driven slip steer vehicle according to Embodiment 1 of the present application, and the method includes:
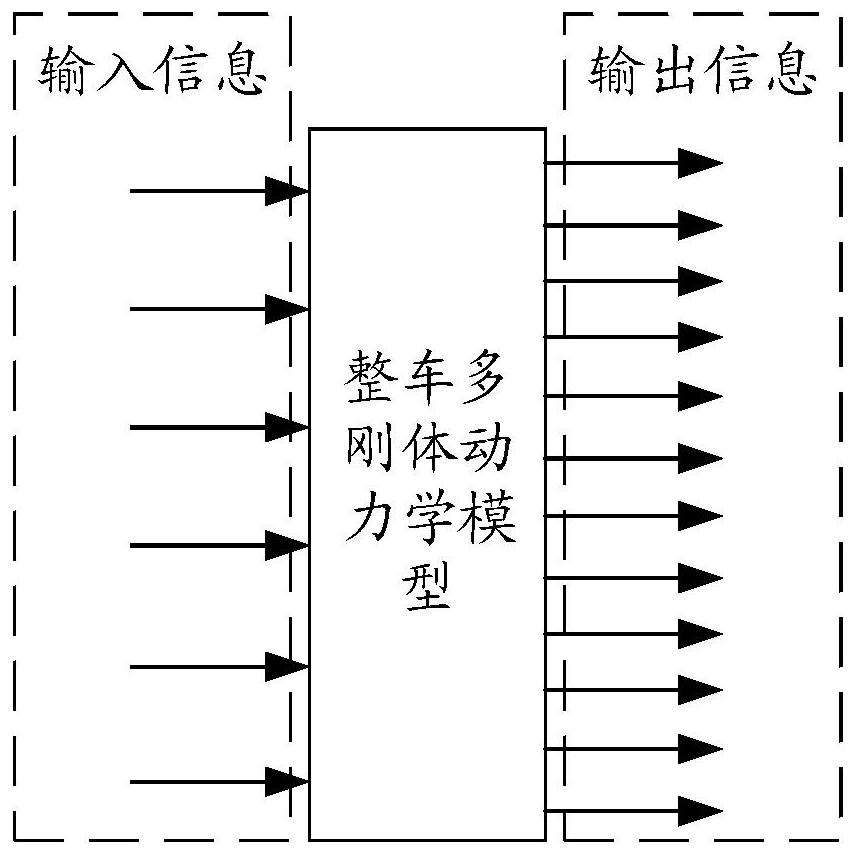
[0046]Step S101: Create a vehicle multi-rigid body dynamic model in the first software, determine the input information and ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More