

Pneumatic soft body gripper
A technology of software and software drivers, applied in the direction of manipulators, picking machines, chucks, etc., can solve problems such as complex structures, and achieve the effect of low cost, simple structure, and easy access
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be pointed out that for those of ordinary skill in the art, several changes and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
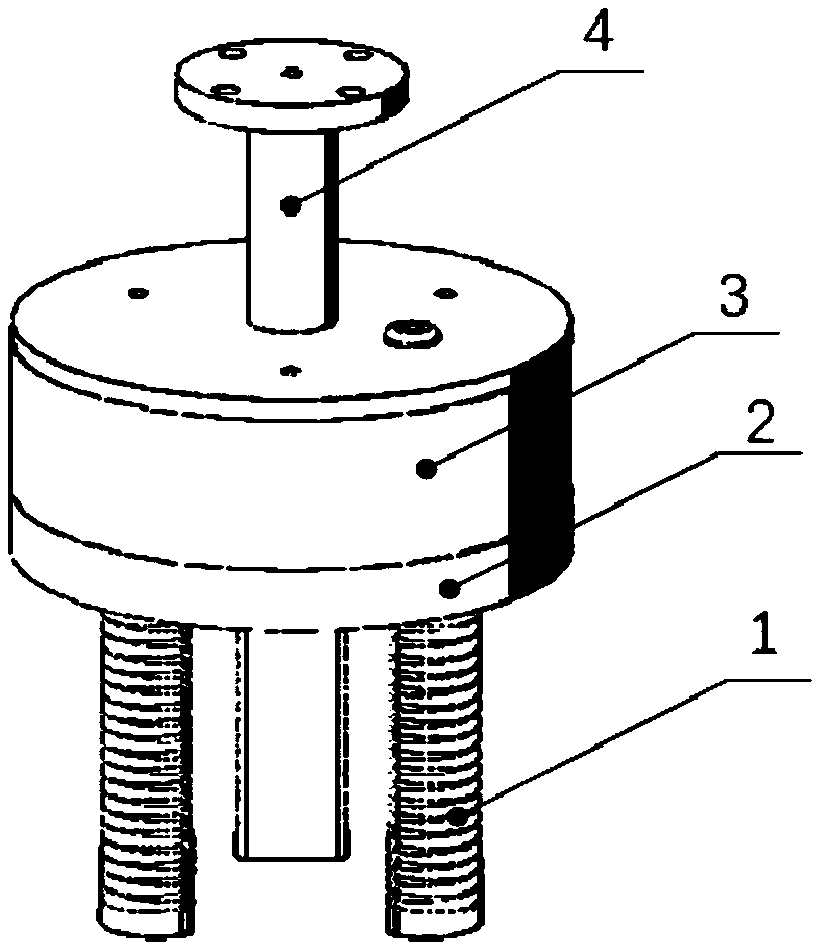
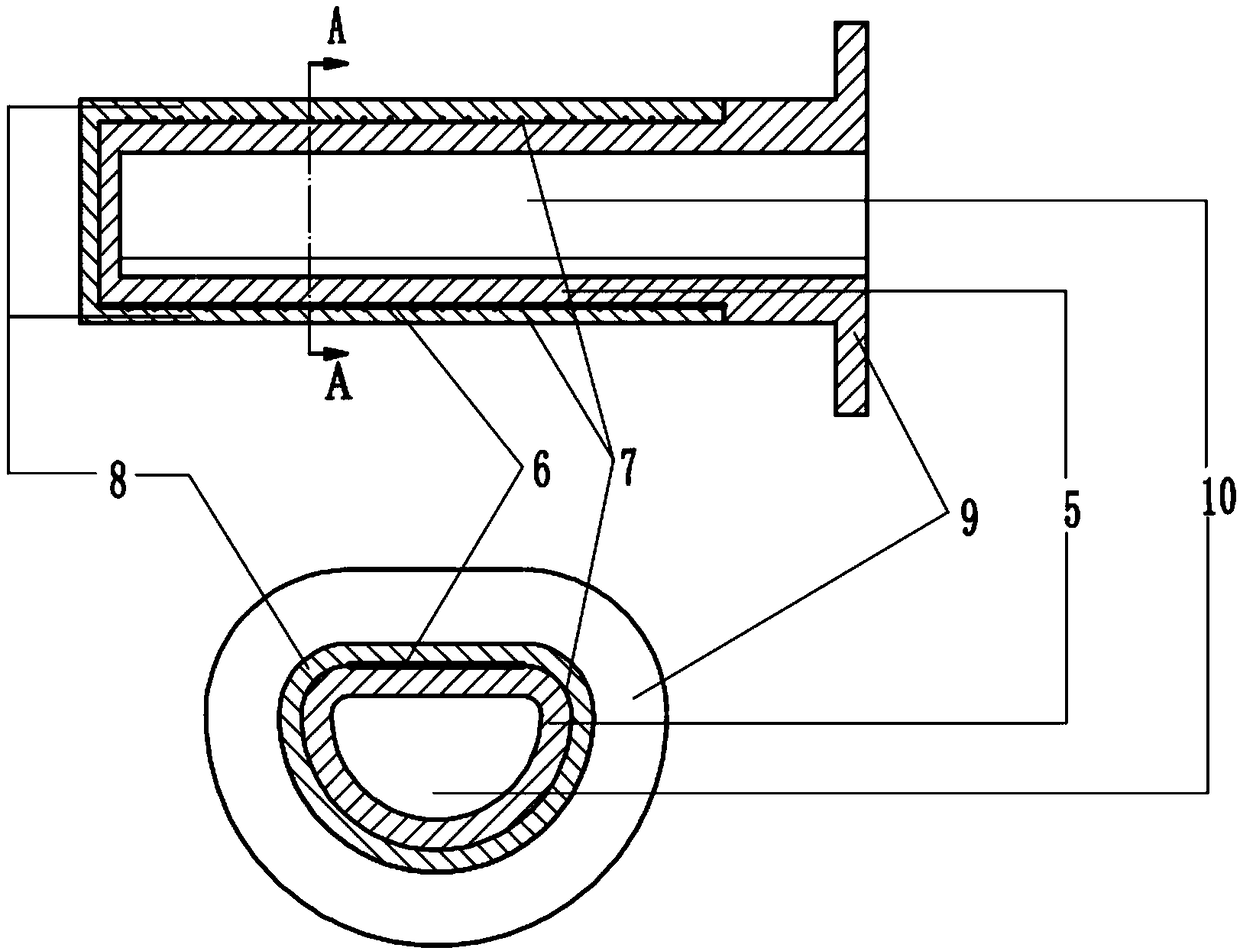
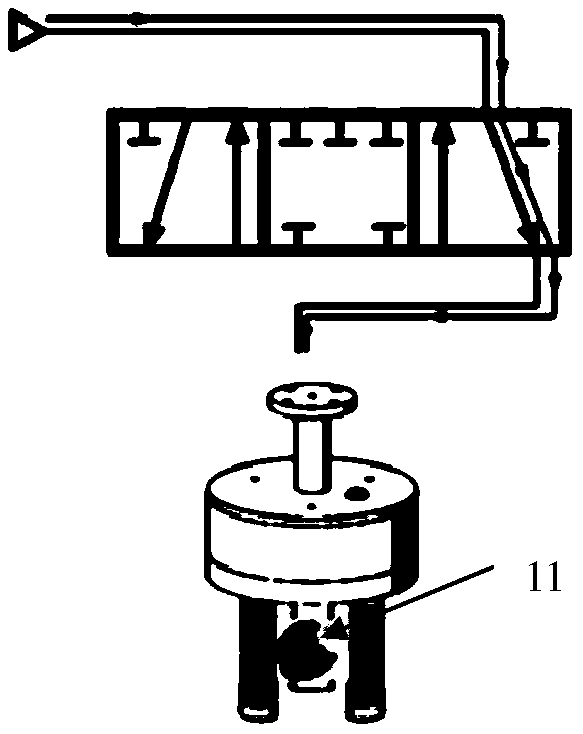
[0041] Such as figure 1 As shown, the present invention provides a pneumatic soft gripper, which includes a pneumatic soft driver 1 and a clamping device; the pneumatic soft driver 1 is connected to the clamping device, and the pneumatic soft driver 1 is bent to one side under the action of air pressure. The clamping device is used to install the software driver, introduce the air source and facilitate the installation of the software gripper on the end of the robotic arm. Three pne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More