

A control method for steering a vehicle driven by four-wheel hub motors
A technology of in-wheel motor and control method, which is applied in the direction of automatic steering control components, vehicle components, steering mechanisms, etc., can solve problems such as no consideration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
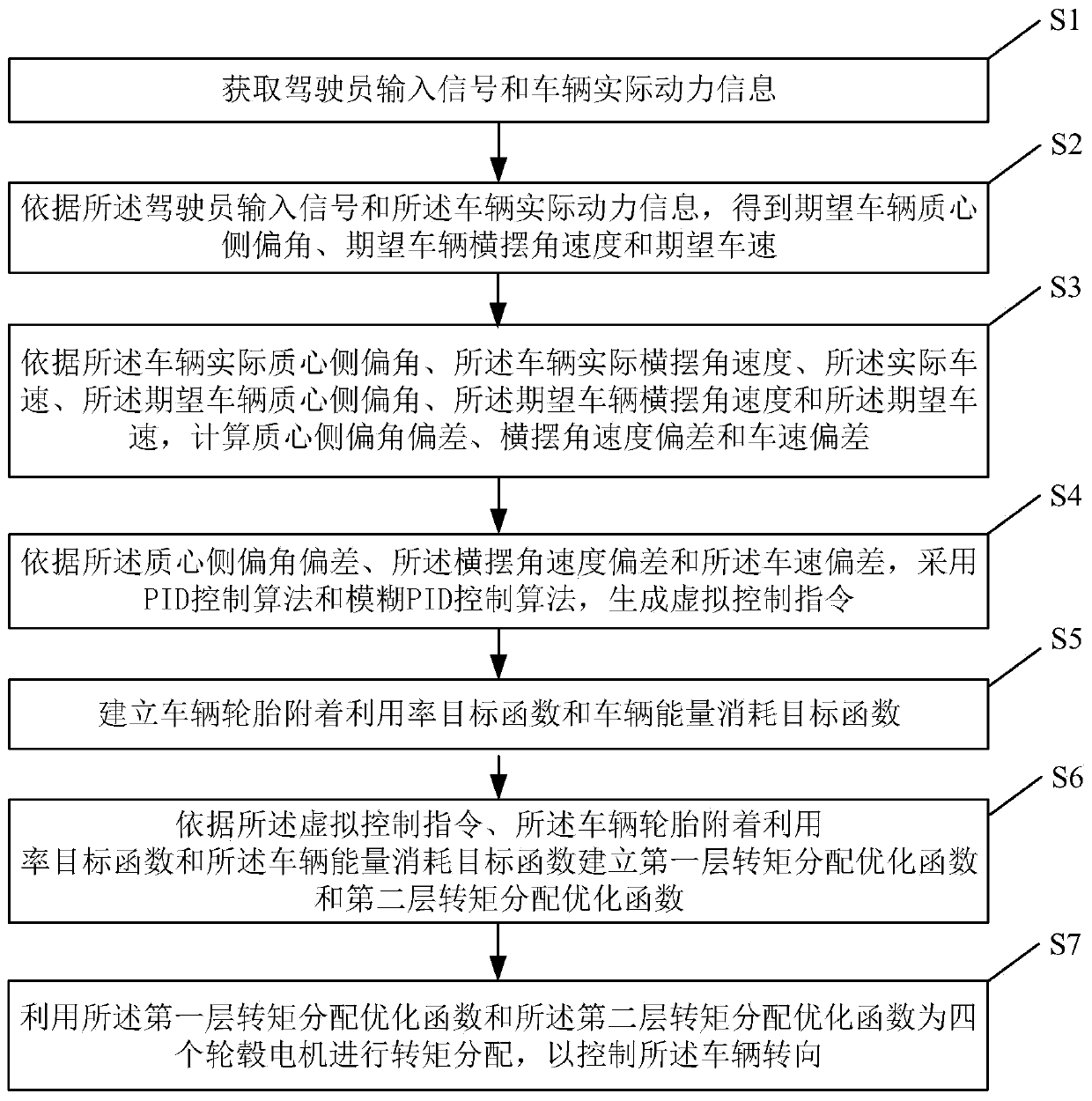
[0056] figure 1 It is a flowchart of a control method for steering a vehicle driven by four-wheel hub motors in the present invention.
[0057] see figure 1 , the method for controlling the steering of a vehicle driven by four-wheel hub motors in this embodiment includes:
[0058] Step S1: Obtain the driver input signal and the actual power information of the vehicle.
[0059] The driver input signal includes an accelerator pedal signal, a brake pedal signal and a steering wheel angle signal; the vehicle actual power information includes a vehicle actual center-of-mass side slip angle, a vehicle actual yaw rate and an actual vehicle speed.
[0060] Step S2: According to the driver input signal and the actual power information of the vehicle, an expected vehicle center-of-mass sideslip angle, an expected vehicle yaw rate, and an expected vehicle speed are obtained.
[0061] Described step S2 specifically comprises:
[0062] Establish a two-degree-of-freedom vehicle dynamics...
Embodiment 2
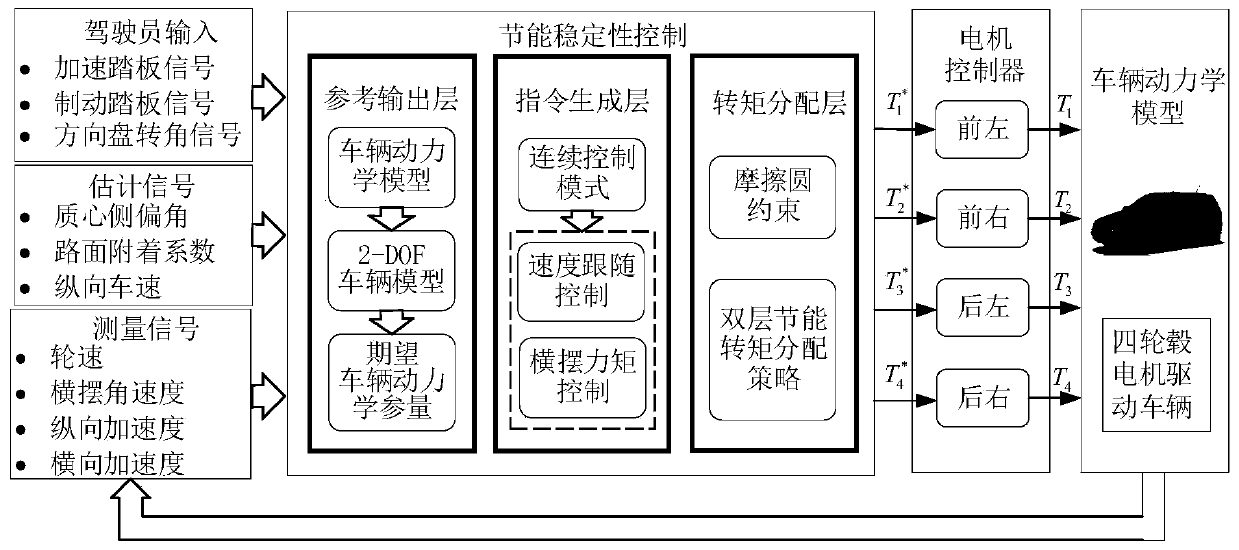
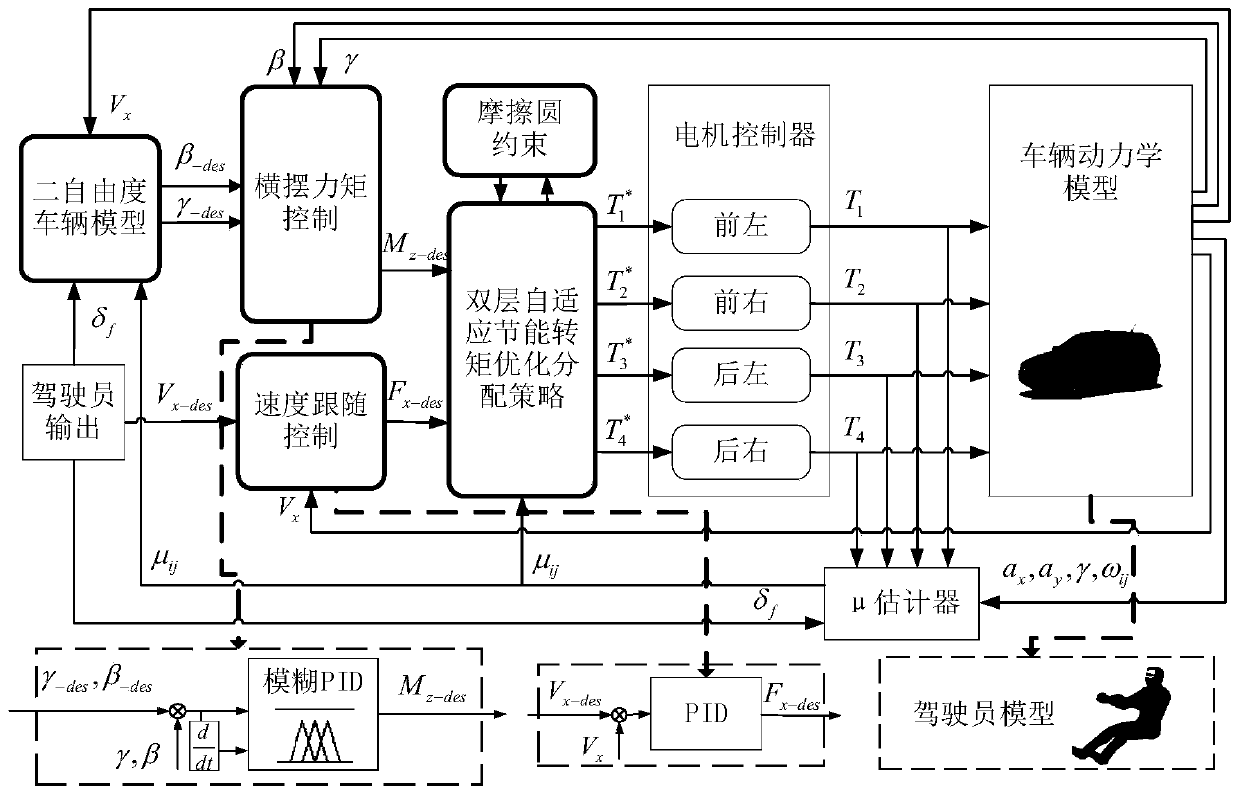
[0122] The steering control method of the vehicle driven by the four-wheel hub motors in this embodiment is realized by designing a multi-level control structure. figure 2 It is a schematic diagram of the multi-level control structure of the present invention, see figure 2 , the structure includes: reference output layer, instruction generation layer and torque distribution layer. image 3 It is a schematic diagram of a steering control method for a vehicle driven by four-wheel hub motors in the present invention.
[0123] Reference output layer:
[0124] This layer establishes a two-degree-of-freedom vehicle dynamics reference model, and obtains the expected vehicle mass center side according to the driver input signal (acceleration pedal signal, brake pedal signal, and steering wheel angle signal), the vehicle's actual mass center side slip angle, and the vehicle's actual yaw rate. Declination angle and expected vehicle yaw rate; according to the vehicle actual center of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More