

A full-form ostrich-like high-speed running and jumping robot
A robot and ostrich technology, applied in the field of full-form ostrich-like high-speed running and jumping robots, can solve problems such as slow movement of biped robots, achieve powerful high-speed running and jumping capabilities, and have a wide range of social application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in conjunction with the accompanying drawings.
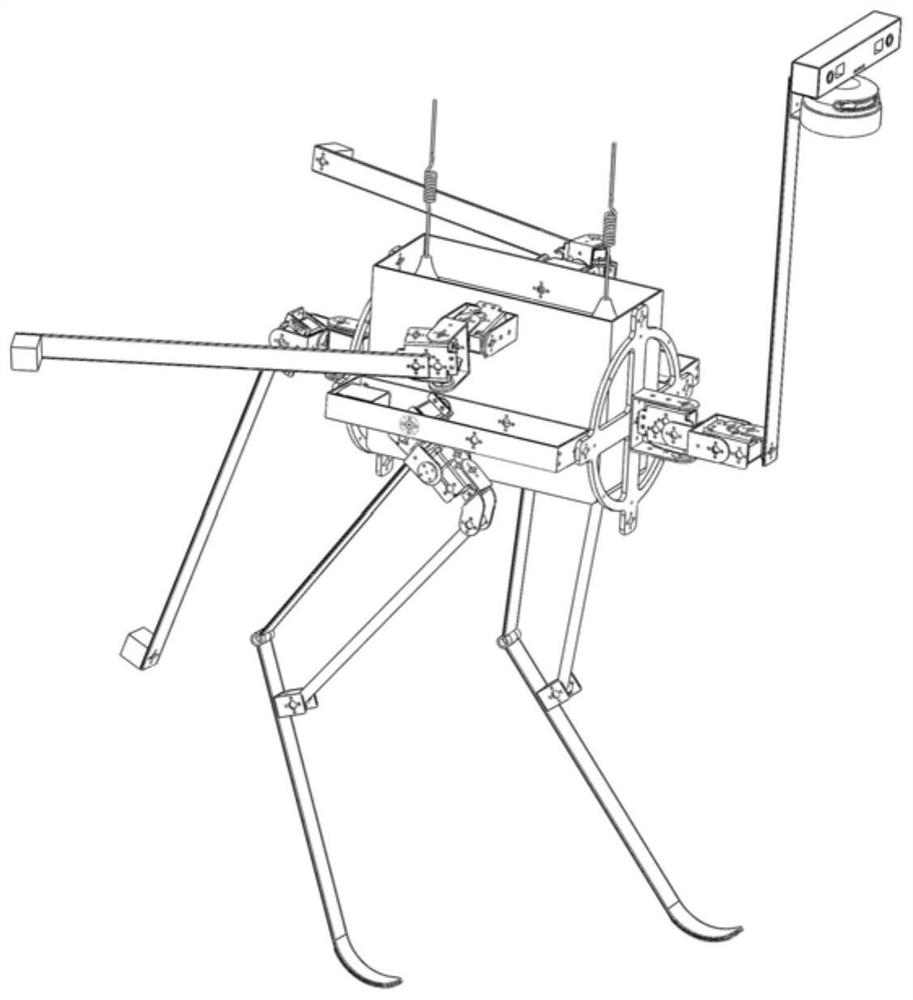
[0024] The problem to be solved by the present invention is to design a full-form imitation ostrich high-speed running and jumping robot, which has a simple structure and a perfect bio-like overall structure. The stable and balanced steering design and the three-degree-of-freedom design of the feet enable the high-speed running and jumping of the full-form ostrich-like robot.
[0025] The technical scheme that the present invention solves its technical problem adopts is:
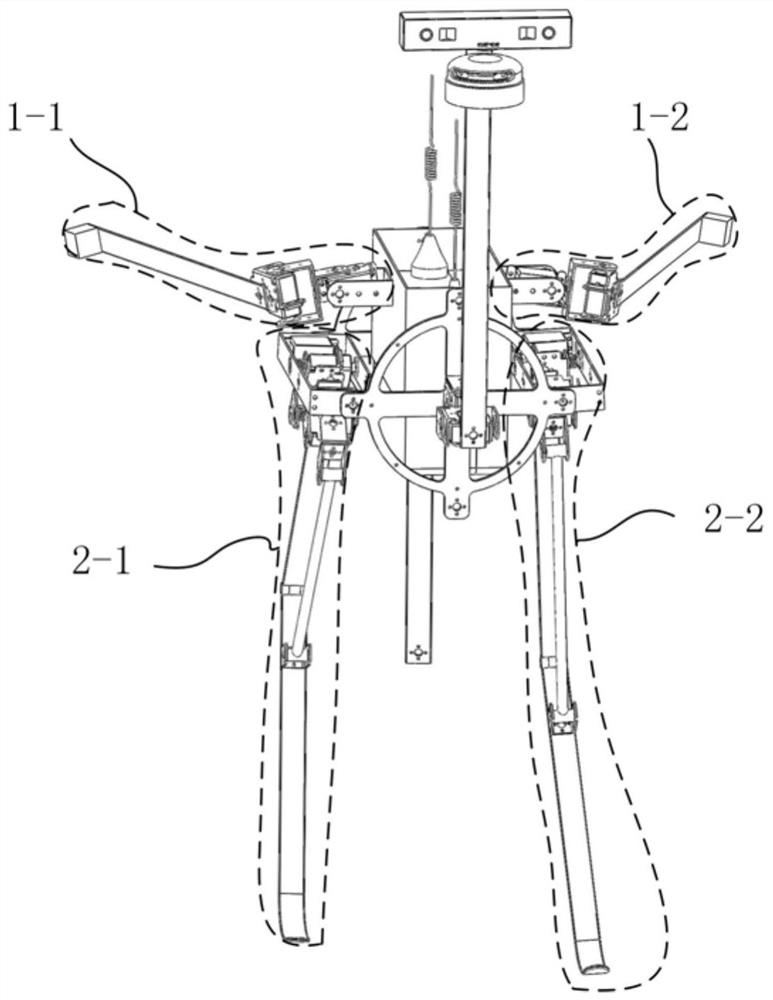
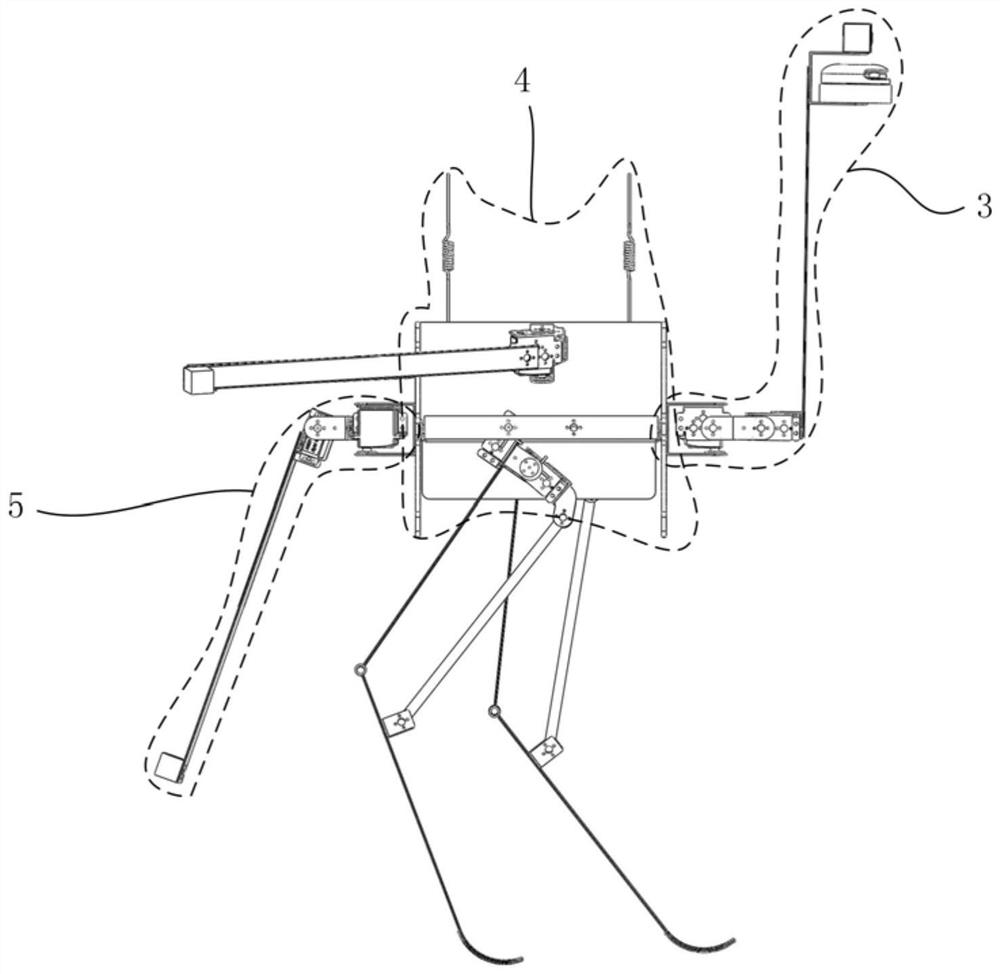
[0026] A full-form imitation ostrich high-speed running and jumping robot, its overall structure can be composed of first and second wing components (1-1, 1-2), first and second leg components (2-1, 2-2 ), head and neck assembly (3), trunk assembly (4) and tail assembly (5) constitute.
[0027] Such as figure 2 and image 3 As shown, the first wing assembly (1-1) and the second wing assembly (1-2) are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More