

High-speed running-jump simulated-leopard robot with spine and head and tail
A robot and spine technology, applied in manipulators, motor vehicles, manufacturing tools, etc., can solve problems such as low gait speed, achieve powerful high-speed running and jumping capabilities, and have a wide range of social application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in conjunction with the accompanying drawings.
[0027] The problem to be solved by the present invention is to design a high-speed running and jumping imitation leopard robot with spine and head and tail. The balanced steering design, the bionic design of the two-degree-of-freedom spine and the three-degree-of-freedom design of the limbs are used to realize the high-speed running and jumping of the leopard-like robot.
[0028] The technical scheme that the present invention solves its technical problem adopts is:
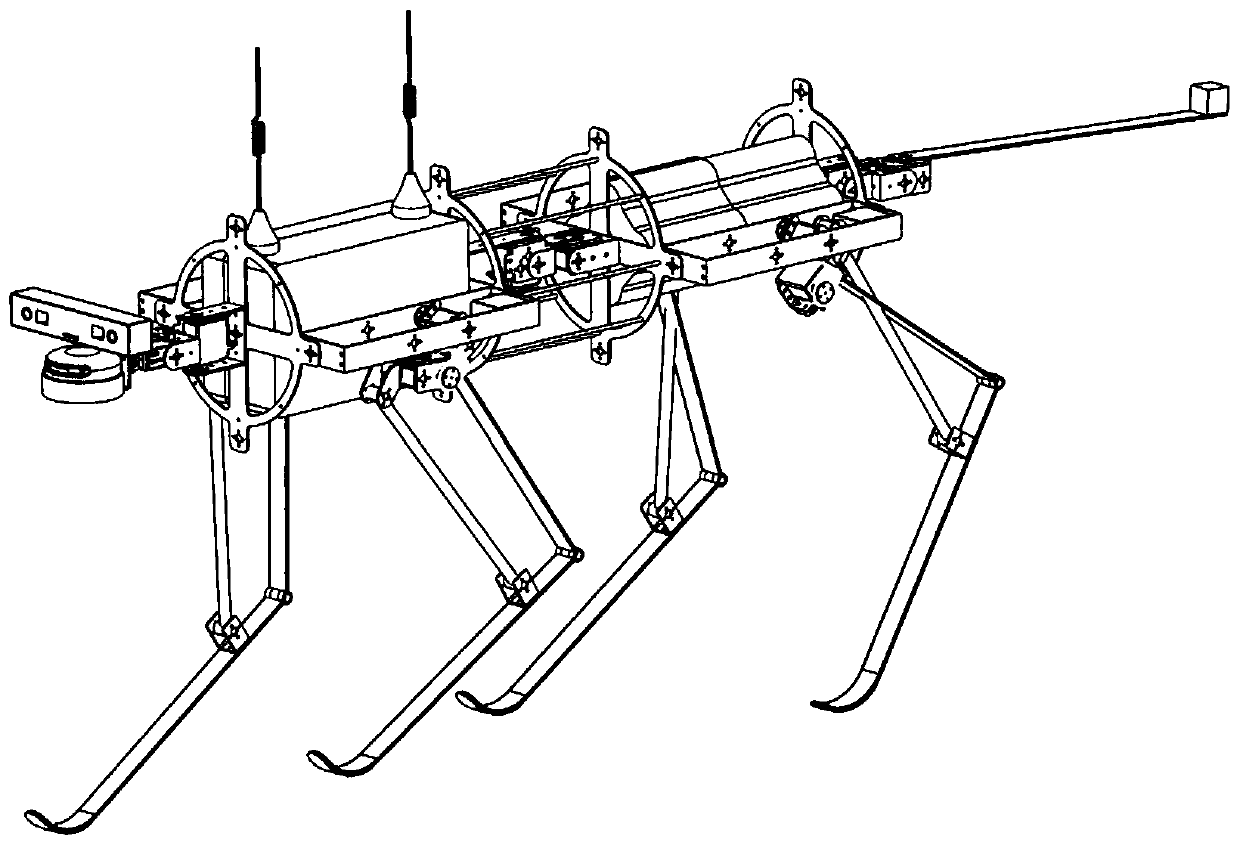
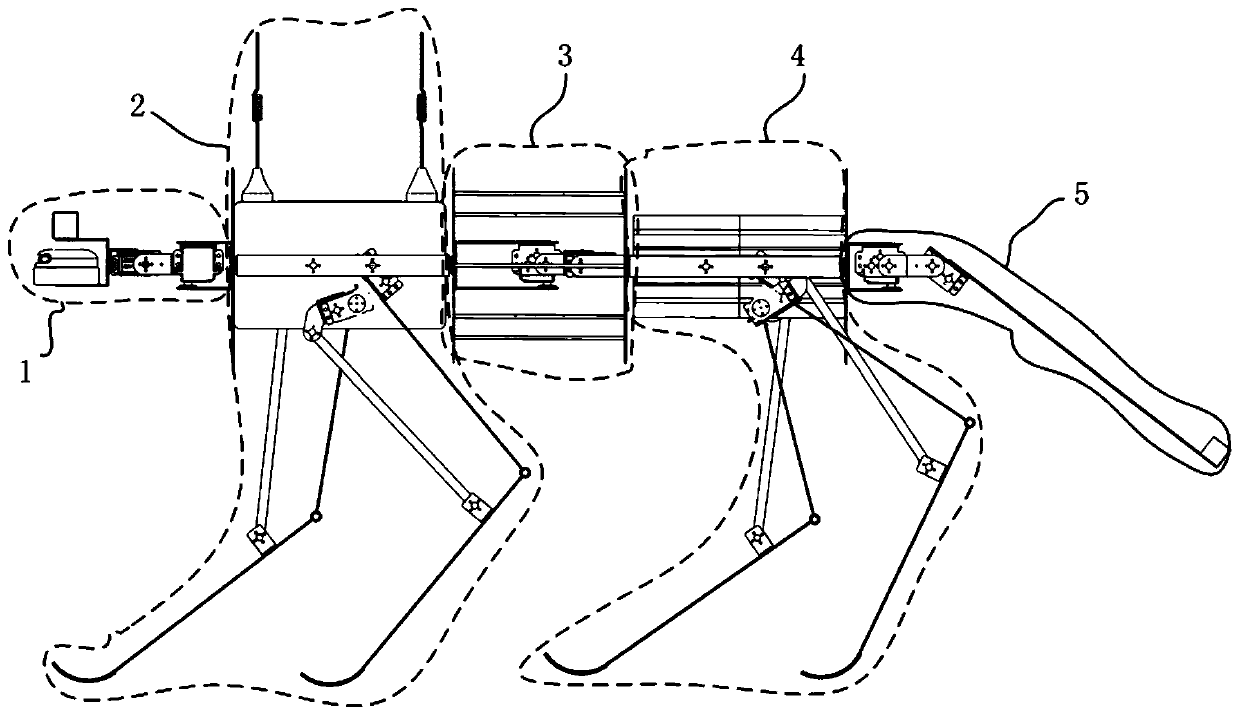
[0029] A high-speed running and jumping imitation leopard robot with spine, head and tail, its overall structure is as follows: figure 2 As shown, it can be composed of head assembly (1), trunk front assembly (2), spine assembly (3), trunk rear assembly (4) and tail assembly (5); wherein, the head assembly and the trunk front The first support plate (11-1) of the component (2) is fixedly connected by bolts a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More