

Foldable and reconfigurable variable-wheel-track all-terrain trolley and control method of foldable and reconfigurable variable-wheel-track all-terrain trolley
An all-terrain, variable wheelbase technology, applied in the direction of motor vehicles, substructures, vehicle components, etc., to achieve a wide range of social application prospects, all-round mobility performance, and improve stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in conjunction with the accompanying drawings.
[0036]The problem to be solved in the present invention is to design a foldable and reconfigurable all-terrain car with variable wheelbase and its control method, so as to ensure the high-speed movement ability of the wheeled robot and further improve the adaptability and maneuverability of the robot to the complex terrain environment .
[0037] The technical scheme that the present invention solves its technical problem adopts is:
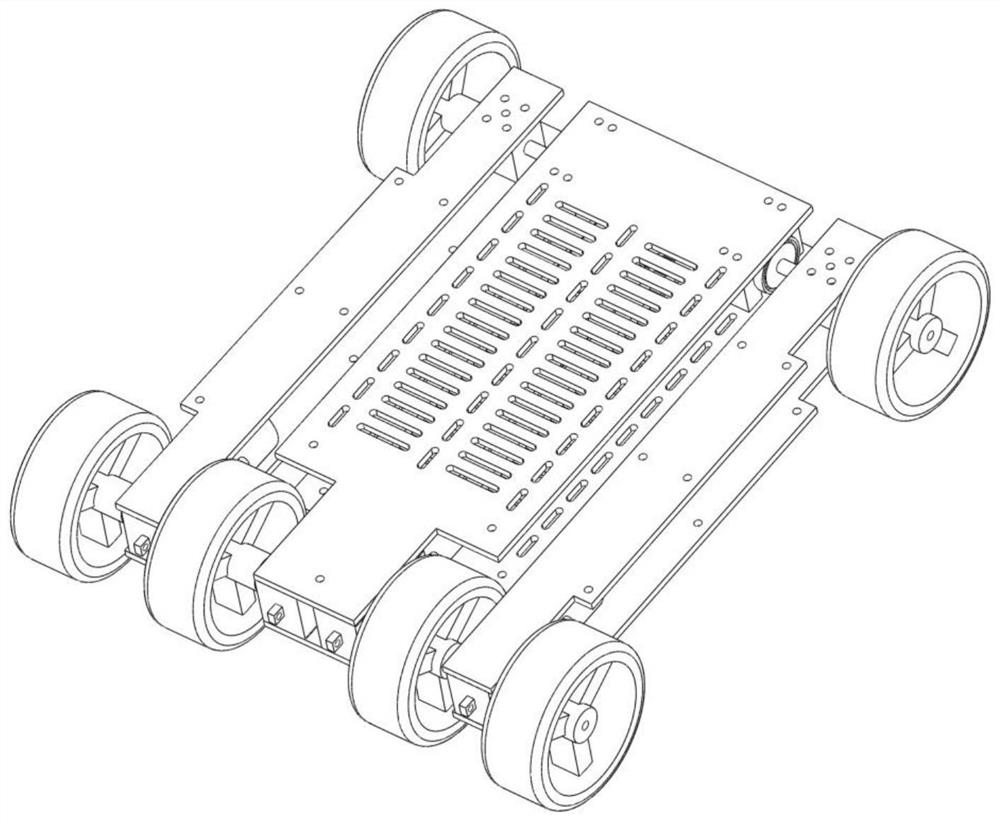
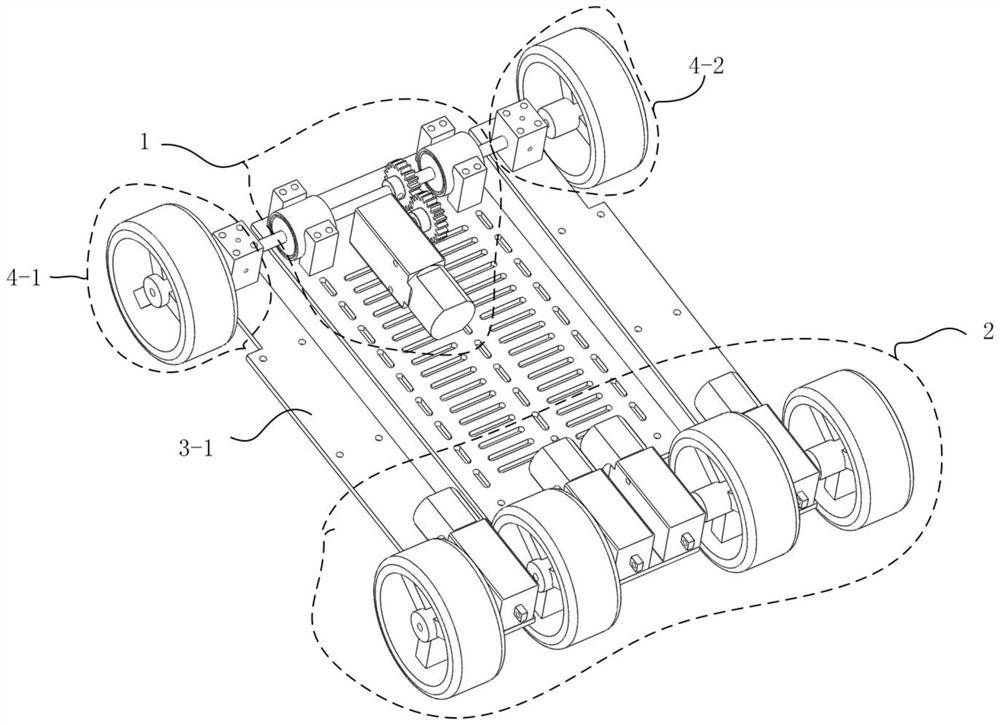
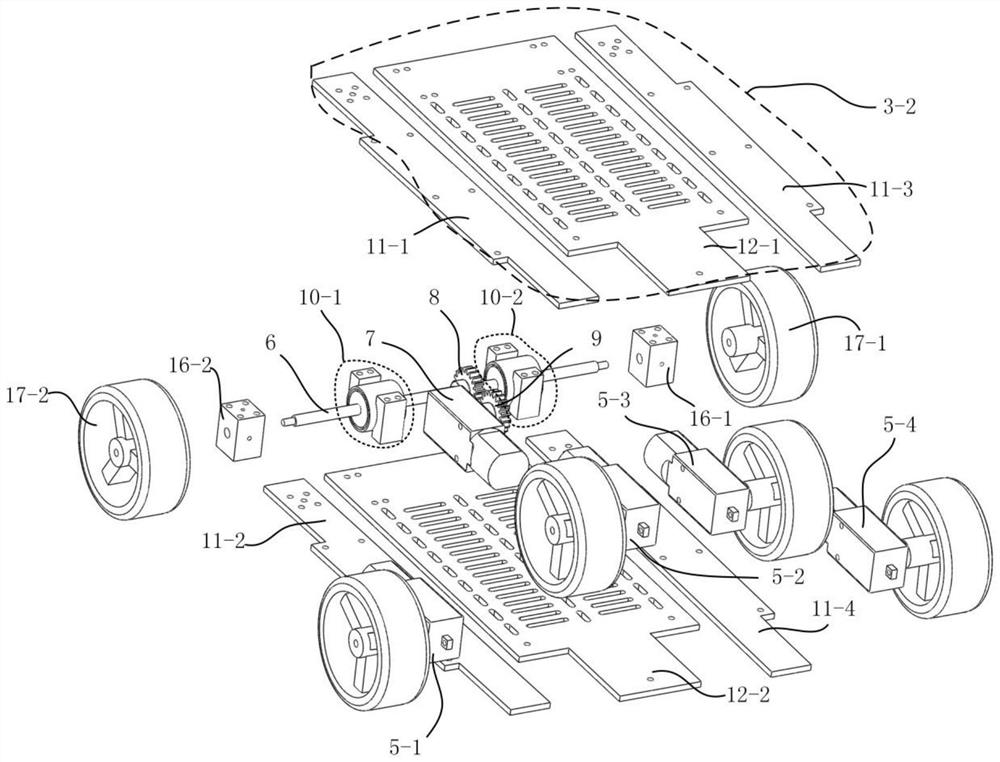
[0038] A foldable and reconfigurable all-terrain car with variable wheelbase, such as figure 1 As shown, its overall structure consists of attitude adjustment assembly (1), driving wheel assembly (2), bottom support plate (3-1), top support plate (3-2) and first and second driven wheel assemblies (4- 1, 4-2) Composition;
[0039] Wherein, the attitude adjustment assembly (1) is fixed on the second main board (12-2) of the bottom support plate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More