

Four-foot wheel type deformable omni-directional mobile robot and control method thereof
A technology of omnidirectional movement and control method, which is applied in the field of four-legged wheeled deformable omnidirectional mobile robot and its control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in conjunction with the accompanying drawings.
[0030] The problem to be solved by the present invention is to design a four-legged wheeled deformable omnidirectional mobile robot and its control method, which can simultaneously realize the high moving speed of the wheeled movement and the high complex environment adaptability of the footed movement, so as to meet the needs of different terrain environments. The requirements for driving efficiency and driving ability are as follows.
[0031] The technical scheme that the present invention solves its technical problem adopts is:
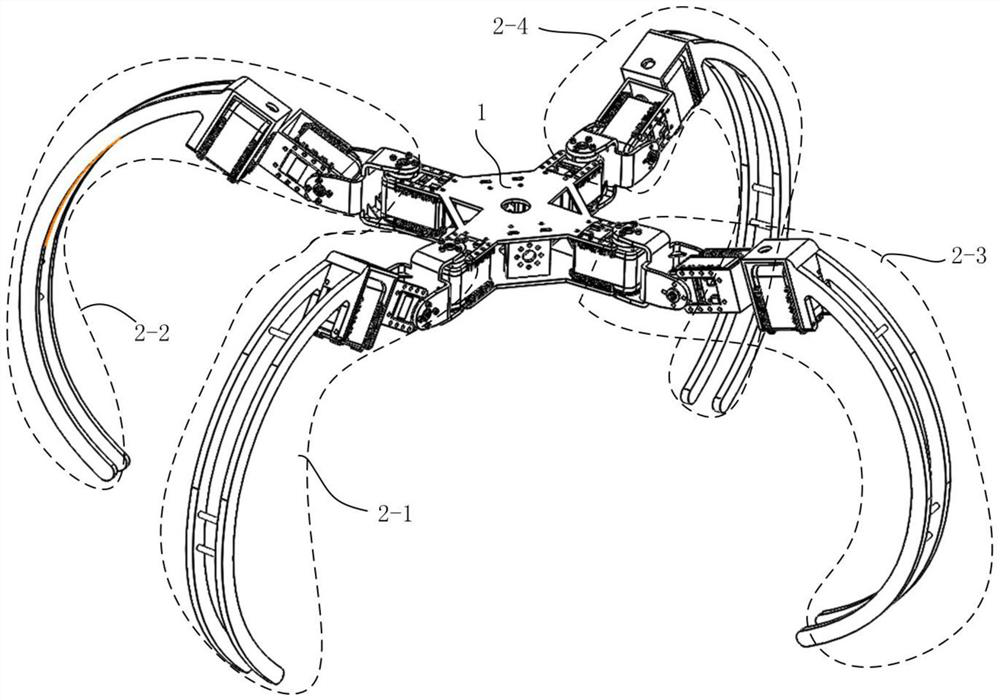
[0032] Such as figure 1 Shown, a kind of quadruped wheel type deformable all-round mobile robot is characterized in that: its overall structure is made up of car body (1), first, second, third and fourth leg foot chain (2-1 , 2-2, 2-3, 2-4) form;
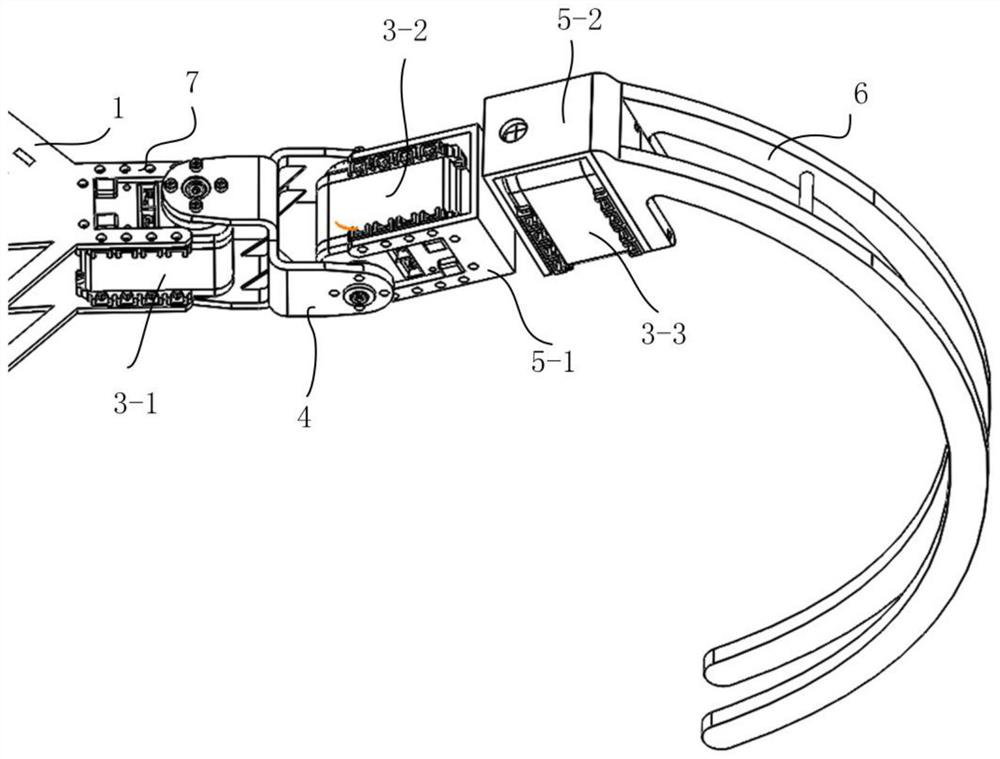
[0033] Wherein, the near-body motor (3-1) of the first, second, third and fourth leg-foot chain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More