

Intelligent table tennis ball picking robot and control method thereof
A technology of intelligent control and table tennis, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of increased processing cost and use cost, large space occupied by robots, and difficult to pick up table tennis balls To achieve the effect of improving picking efficiency, high picking efficiency and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention is described in detail below in conjunction with accompanying drawing and specific embodiment:
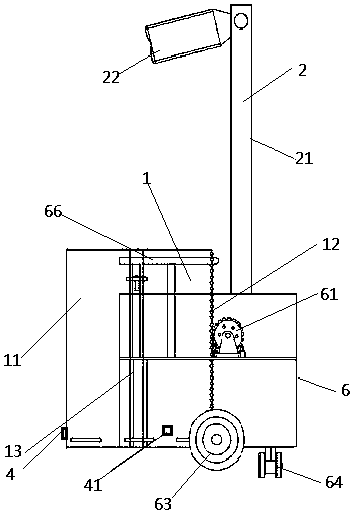
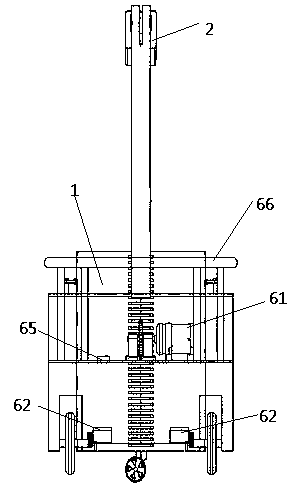
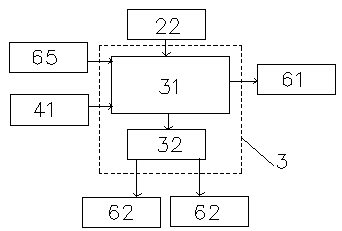
[0029] Such as Figure 1-3 Shown, a kind of table tennis intelligent pick-up robot comprises pick-up device 1, visual positioning device 2, intelligent control device 3, obstacle avoidance device 4, power supply unit and base 6, described picking-up device 1 and visual positioning device 2 are arranged on one side and the upper part of the base 6 respectively, and the intelligent control device 3 and the power supply device are arranged inside the base 6 .
[0030] The base 6 is set as a hollow column as a whole, which can be cylindrical or other special-shaped column structures. It can be designed by itself according to actual needs. One side of the base 6 is provided with an arc-shaped groove in a vertical direction. The left and right sides of the base 6 are respectively provided with traveling wheels 63 , and each traveling wheel 63 is connected to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More