

Point cloud segmentation method for three-dimensional measurement of complex special-shaped curved surface robot
A special-shaped surface and three-dimensional measurement technology, applied in the field of visual measurement, can solve the problems of relying on the rules of regional growth and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
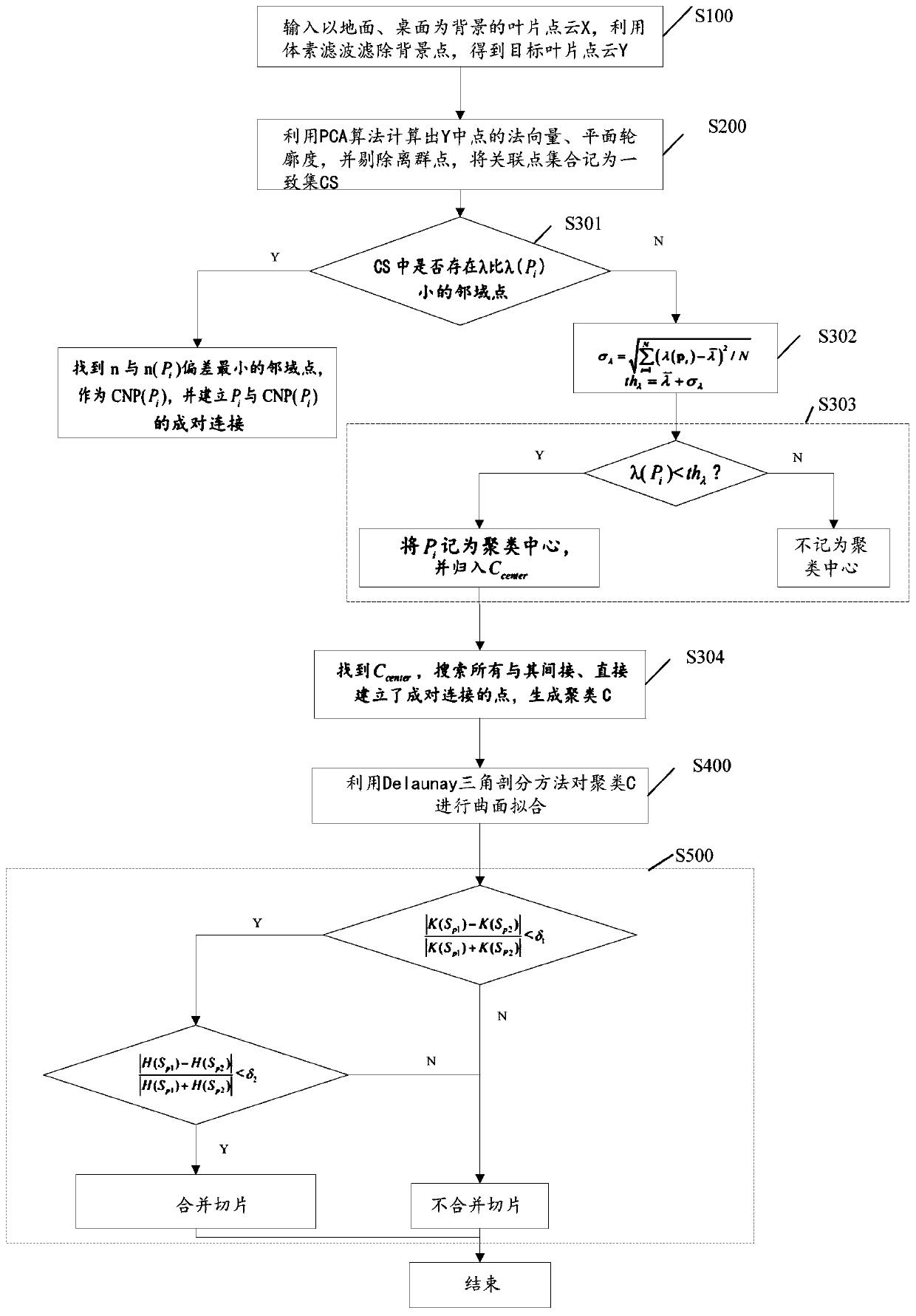
[0081] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0082] The present invention is mainly aimed at complex special-shaped curved surfaces, whose curved surfaces are compositely curved and stacked arbitrarily in space, and have complex edge curvatures. The traditional segmentation method will mistakenly segment the background point into the target point, which will affect the accuracy of the subsequent 3D target measurement, and the direct segmentation will result in a large amount of calculation and slow segmentation speed. In addition, the traditional segmentation method performs shape analysis after segmentation. When fitting, it can only fit planes, or surfaces that can be fitted with regular expressions and have small curvature changes, but c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More