

Robot navigation method
A navigation method and robot technology, applied in the field of robot navigation control, can solve the problem that the positioning accuracy only reaches the centimeter level, and achieve the effect of eliminating accumulated errors and reliable operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
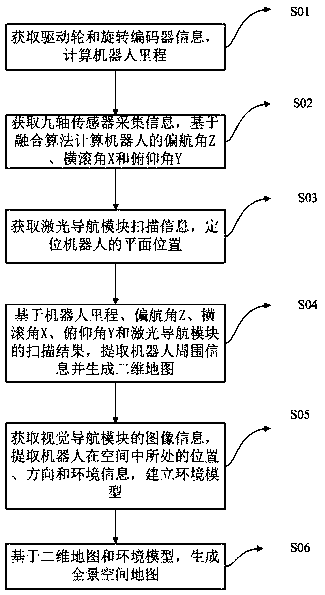
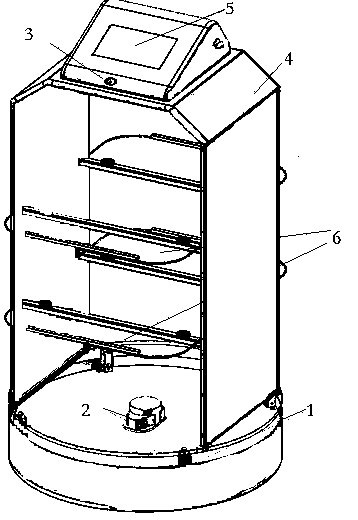
[0039] Such as figure 1 , a robot navigation method of the present invention is applied to a robot with a drive wheel equipped with a rotary encoder, a nine-axis sensor and a laser navigation module 2 on the chassis 1, and a visual navigation module 3 on the head (such as figure 2 ). Methods include:
[0040] Step S01, obtain the driving wheel and rotary encoder information, and calculate the mileage of the robot;
[0041] Step S02, obtain the information collected by the nine-axis sensor, and calculate the yaw angle Z, roll angle X, and pitch angle Y of the robot based on the fusion algorithm;
[0042] Step S03, obtaining the scanning information of the laser navigation module, and locating the plane position of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More