

Method and system for identifying obstacles
An obstacle identification and obstacle technology, which is applied in the field of obstacle identification methods and systems, can solve the problems of being unable to resist real-time jitter, unable to detect the ground normally, etc., to achieve good environmental perception, improve obstacle avoidance strategies, and enhance the degree of intelligence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The present invention will be described in detail below in conjunction with the specific embodiments shown in the accompanying drawings, but these embodiments do not limit the present invention, those of ordinary skill in the art make structural, method, or functional changes based on these embodiments All are included in the scope of protection of the present invention.
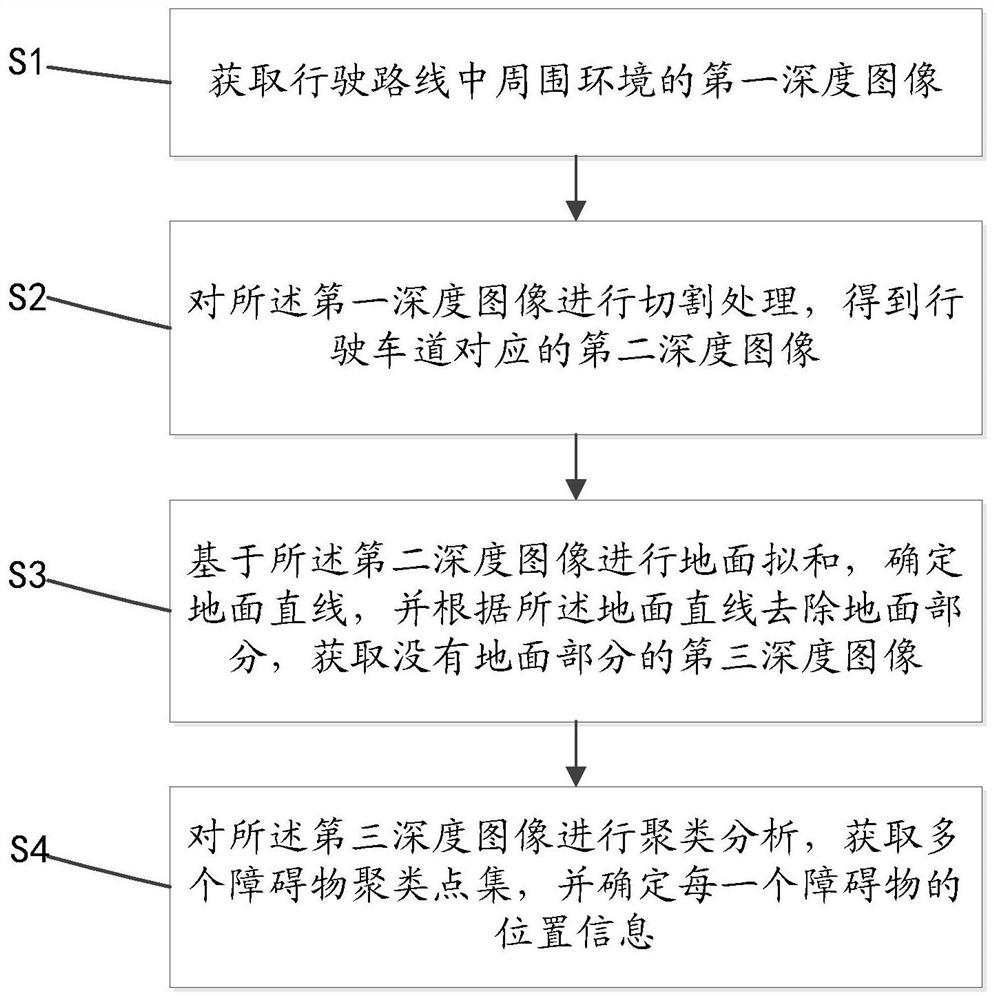
[0051] Such as figure 1 In one embodiment of the present invention shown, the present invention provides a method for identifying obstacles, the method comprising:
[0052] S1. Acquiring the first depth image of the surrounding environment in the driving route;
[0053] S2. Perform cutting processing on the first depth image to obtain a second depth image corresponding to the driving lane;
[0054] S3. Perform ground fitting based on the second depth image, determine a ground straight line, and remove the ground part according to the ground straight line, and obtain a third depth image without the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More