

Robot suitable for inner wall of oil-immersed transformer and capable of achieving electromagnetic adsorption and climbing
A technology of oil-immersed transformers and robots, applied in the field of robots, can solve problems such as heavy survey workload, increased transformer power outage times and power outage time, and inability to accurately judge fault types and fault locations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
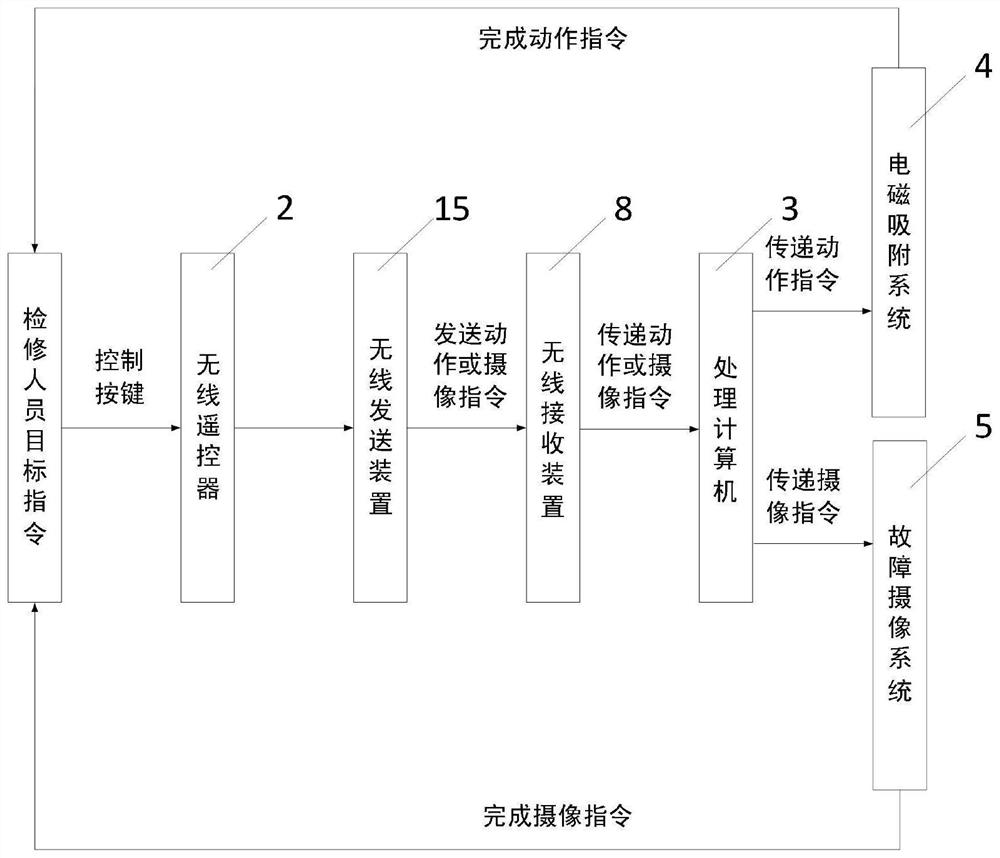
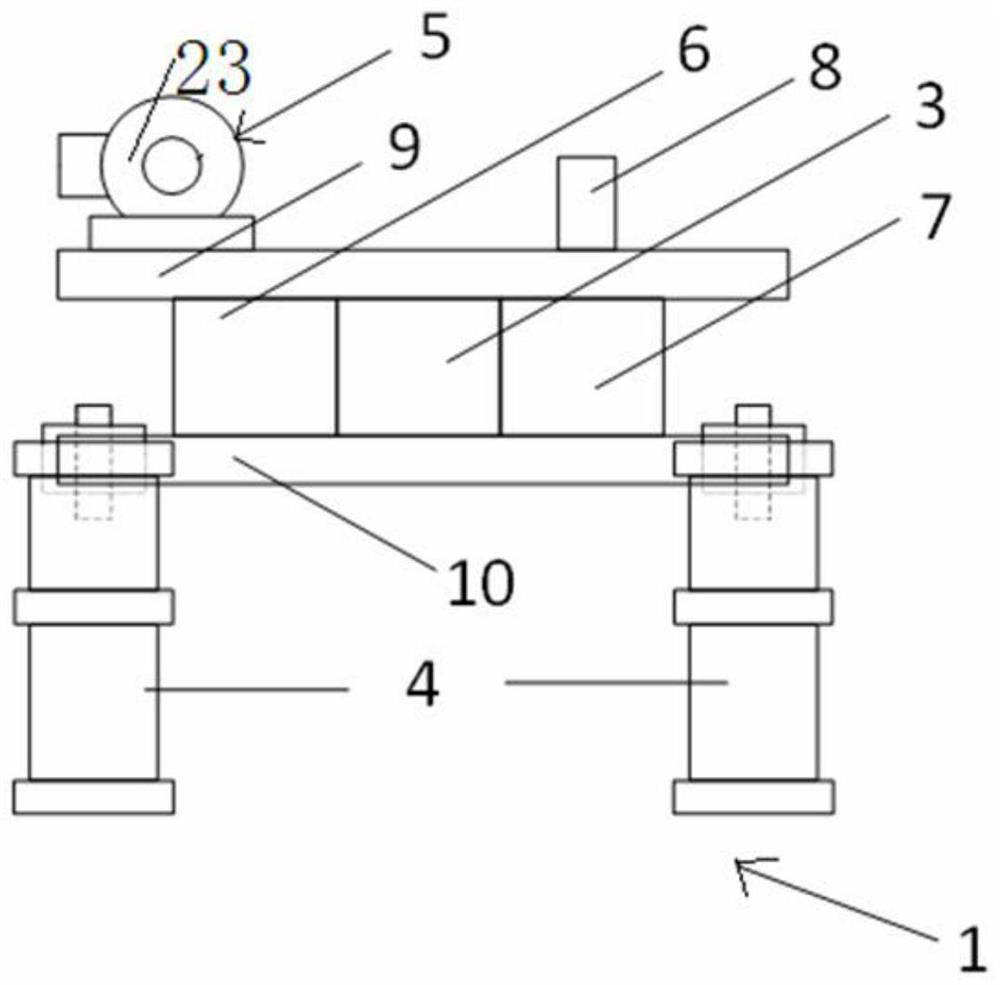
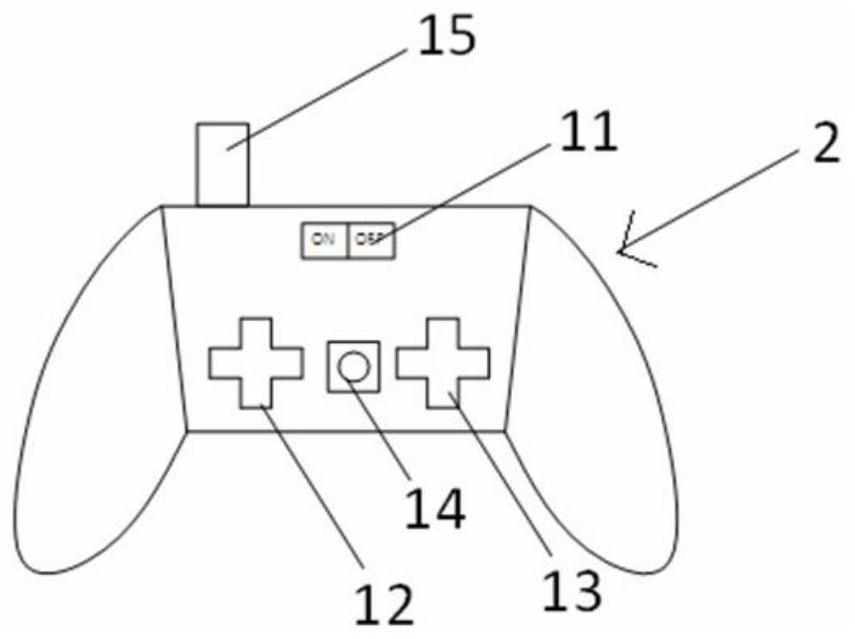
[0037] Embodiment 1: as figure 1 It is shown that a robot suitable for electromagnetic adsorption and climbing on the inner wall of an oil-immersed transformer includes an electromagnetic adsorption robot 1 and a remote controller 2, the electromagnetic adsorption robot 1 and the remote controller 2 are connected by communication, and the electromagnetic adsorption robot 1 is installed If there is a faulty camera system 5, the target command of the maintenance personnel is sent to the wireless receiving device 8 on the electromagnetic adsorption robot 1 through the wireless sending device 15 on the wireless remote controller 2, and then transmitted to the robot controller (processing computer) 3 for processing, and the robot The controller 3 transmits the action instruction and the imaging instruction to the electromagnetic adsorption system 4 or the fault imaging system 5 respectively to complete the target instruction.
[0038] Preferably, the above-mentioned electromagnetic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More