

Climbing robot for angle steel tower
A technology of angle steel towers and robots, which is applied in the direction of manipulators, motor vehicles, manufacturing tools, etc. It can solve problems such as tilting conditions and doubtful reliability of rear mechanical claws, and achieve stable and stable clamping, high climbing efficiency, and guaranteed movement stability. and action reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
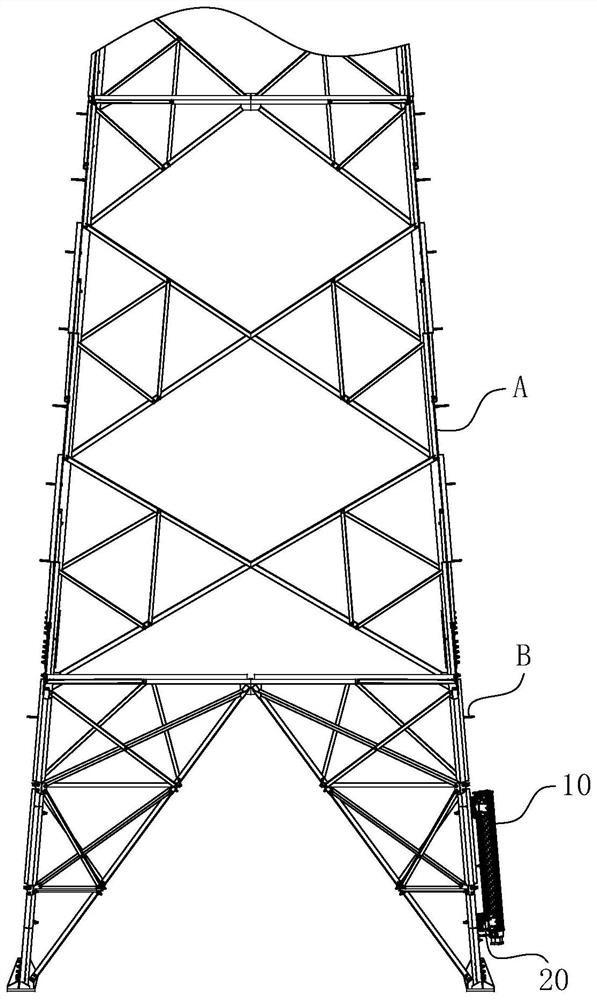
[0057] For the convenience of overall understanding, the structure and working method of the specific embodiment of the climbing robot for the whole angle steel tower are described as follows:
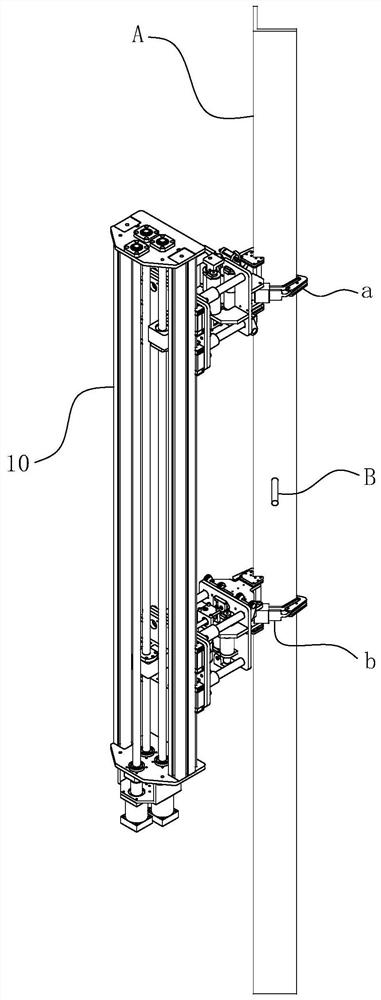
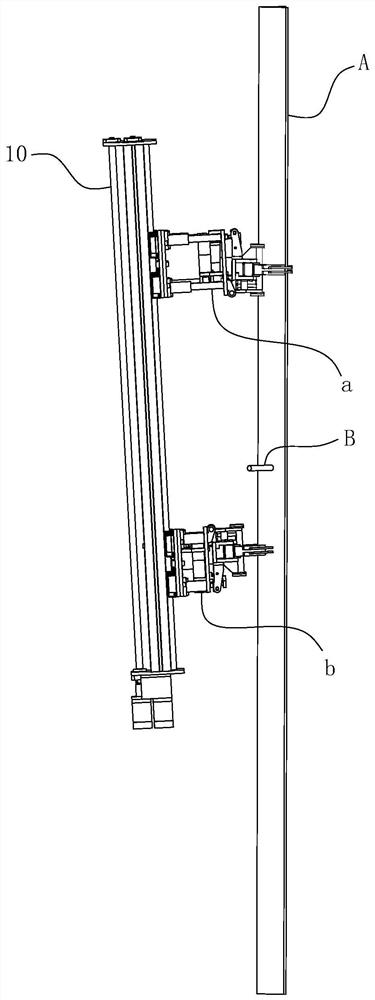
[0058] Climbing robot for angle steel tower, such as Figure 1-20 As shown, its main structure includes a strip-shaped frame-shaped host 10 and clamping components arranged on the host 10; in actual operation, the length direction of the host 10 should be parallel to the length direction of the angle steel A. A sliding track is arranged on the side of the host 10 facing the angle steel A, and an electronically controlled sliding block is arranged on the sliding track, so that the reciprocating motion can be generated in the length direction of the host 10 according to the action of the control unit; Secure a set of clamping components. exist Figure 1-6 In the structure of the specific embodiment shown, it can be seen that the clamping components are divided into two groups, that is,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More