

Air-ground cooperation device and method for remote complex environment investigation
A complex environment, long-range technology, applied in the field of ground-air coordination devices for long-range complex environment investigation, can solve problems such as inability to meet threat target detection work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
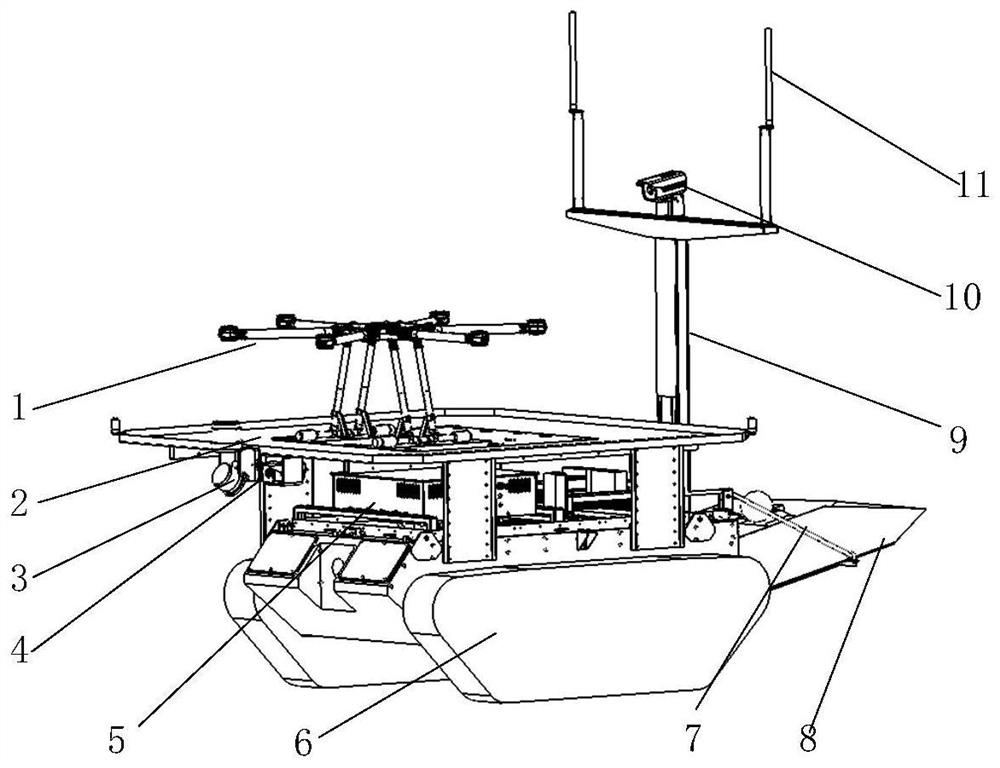
[0033] Embodiment 1, the present invention provides a ground-air coordination device for remote complex environment investigation, such as figure 1 As shown, it includes a large unmanned vehicle device, a small unmanned vehicle device and an unmanned aerial vehicle device. The large unmanned vehicle device includes a large unmanned vehicle chassis 6, an unmanned aerial vehicle landing platform 2 and a small unmanned vehicle overturning car body 8 , the unmanned aerial vehicle landing platform 2 is fixedly arranged on the top of the large unmanned vehicle chassis 6, and the small unmanned vehicle overturning body 8 is located at the rear of the large unmanned vehicle chassis 6 and is connected with the large unmanned vehicle chassis 6; The device is connected with the unmanned aerial vehicle take-off and landing platform 2, and the small unmanned vehicle device is connected with the small unmanned vehicle overturning car body 8. The small unmanned vehicle device includes a smal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More