

Control system of teaching robot based on single processor structure
A technology for controlling systems and processors, applied to architectures with a single central processing unit, general-purpose stored program computers, etc., can solve problems such as reliability impact, high cost, and poor openness of lower-layer CPUs, and improve utilization rate and reliability Improvement, the effect that the structure is simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
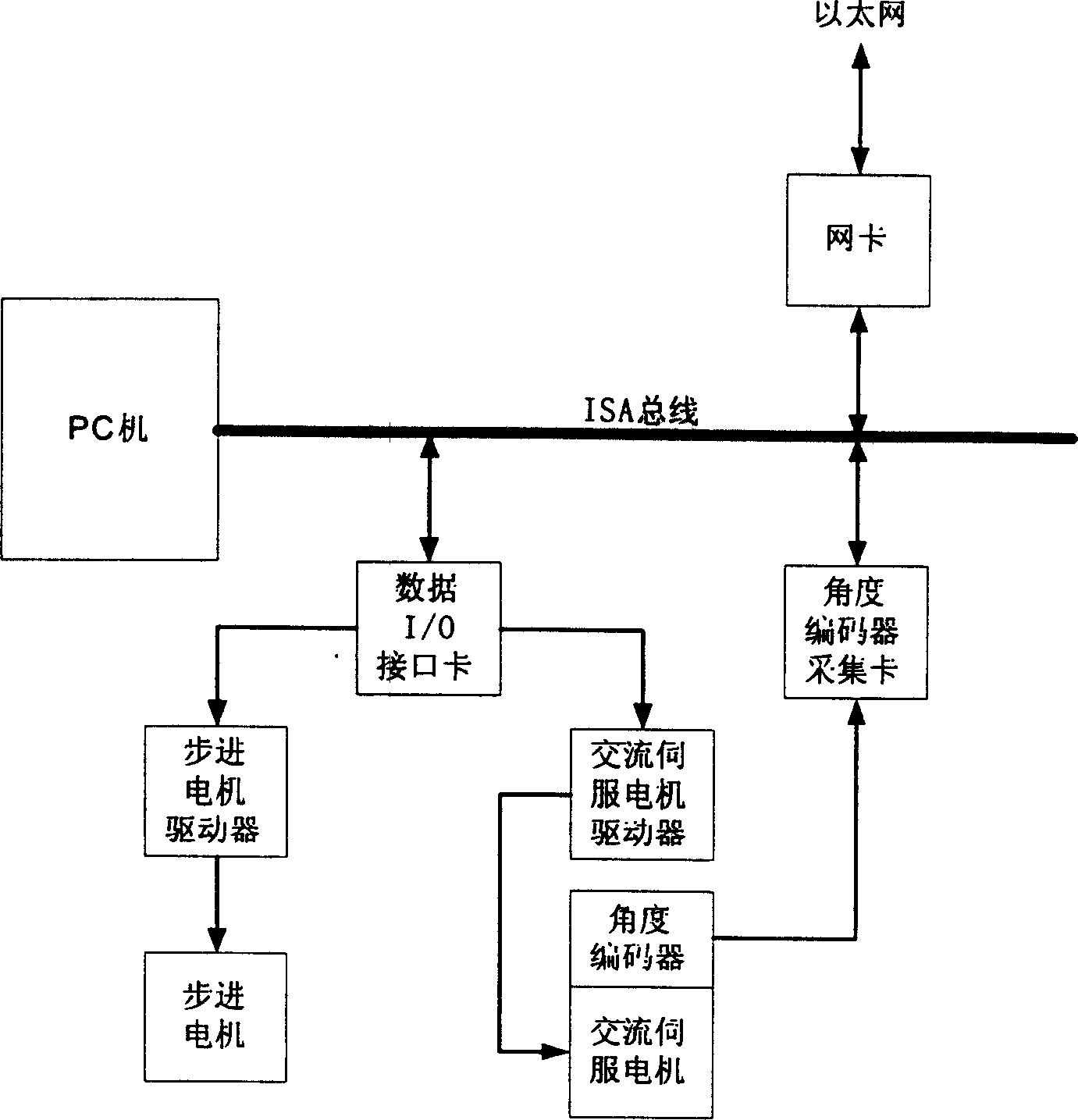
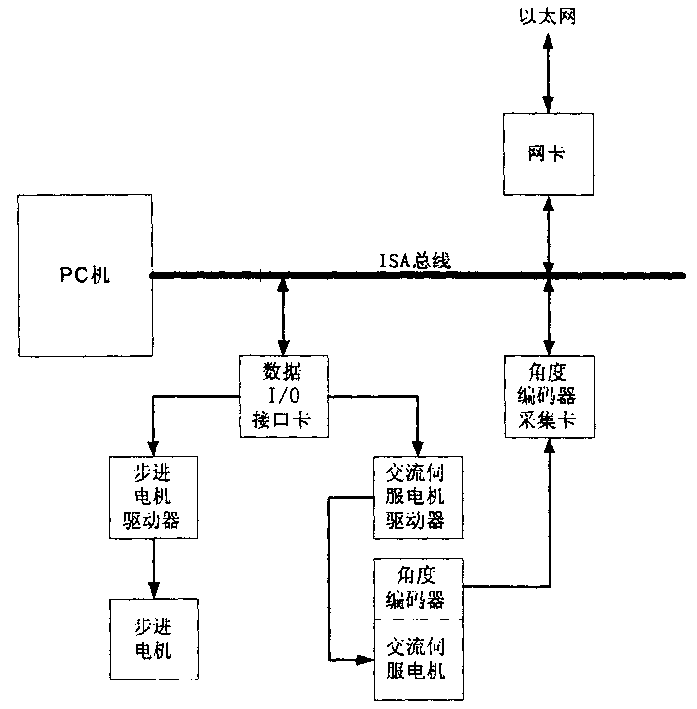
[0020] Such as figure 1 As shown, the system of the present invention includes: PC, ISA bus, input / output (I / O) data interface card, stepper motor driver, stepper motor, AC servo motor driver, AC servo motor, angle encoder, angle encoder acquisition card and network card. The I / O data interface card, the angle encoder acquisition card and the network card are all inserted into the ISA bus of the PC, and the output terminal on the I / O data interface card is connected to the stepper motor driver and the AC servo motor driver through wires, and the stepper motor The output of the driver is connected to the stepper motor through wires, the output of the AC servo motor driver is connected to the AC servo motor through wires, the output of the angle encoder coaxially connected with the AC servo motor is connected to the acquisition card of the ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More