

Five-degree force feedback virtual operation instrument
A technology of virtual surgery and force feedback, applied in the field of medical devices, can solve the problems of no force feedback function, inapplicable surgical scissors, and only one-dimensional force feedback.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
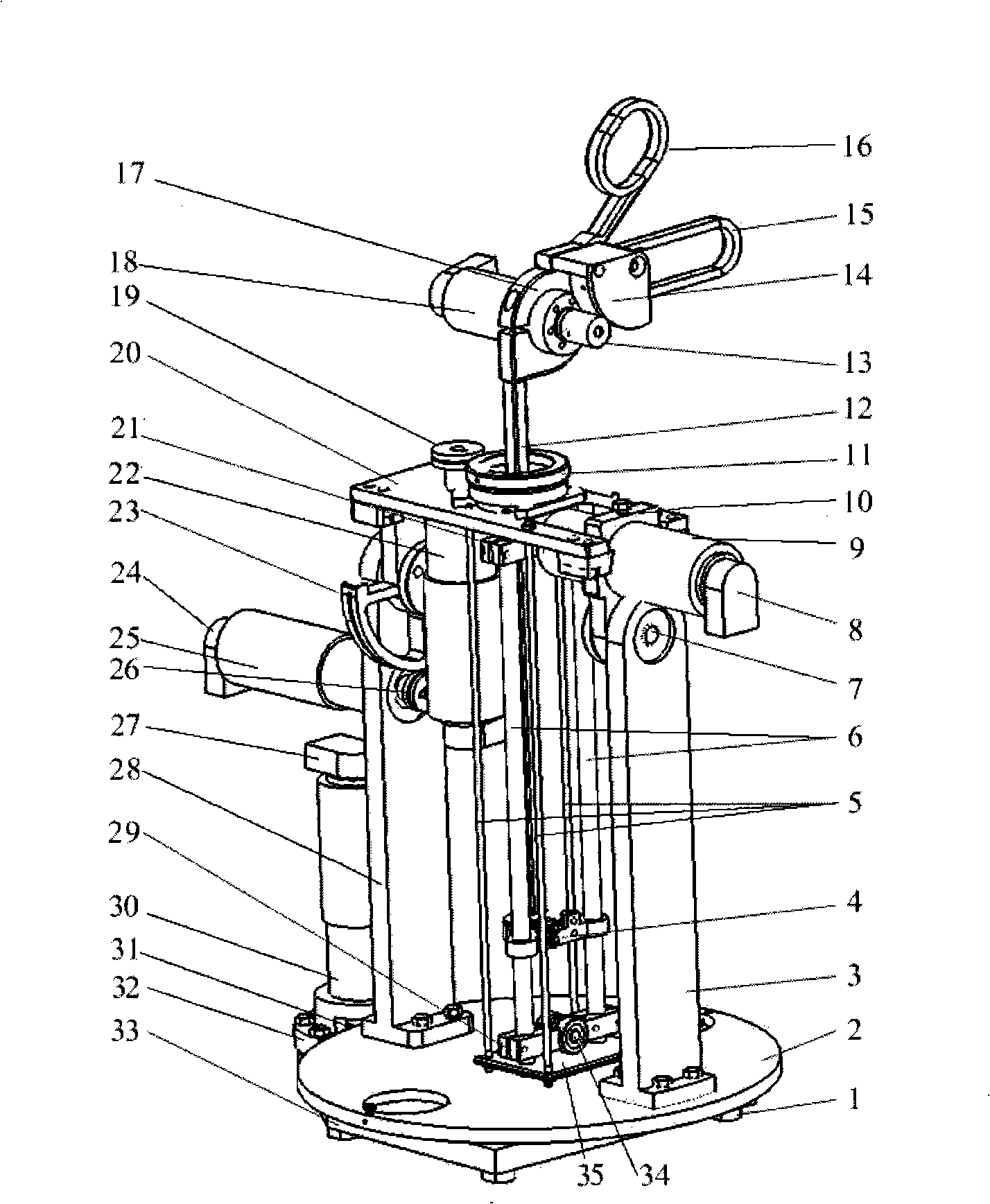
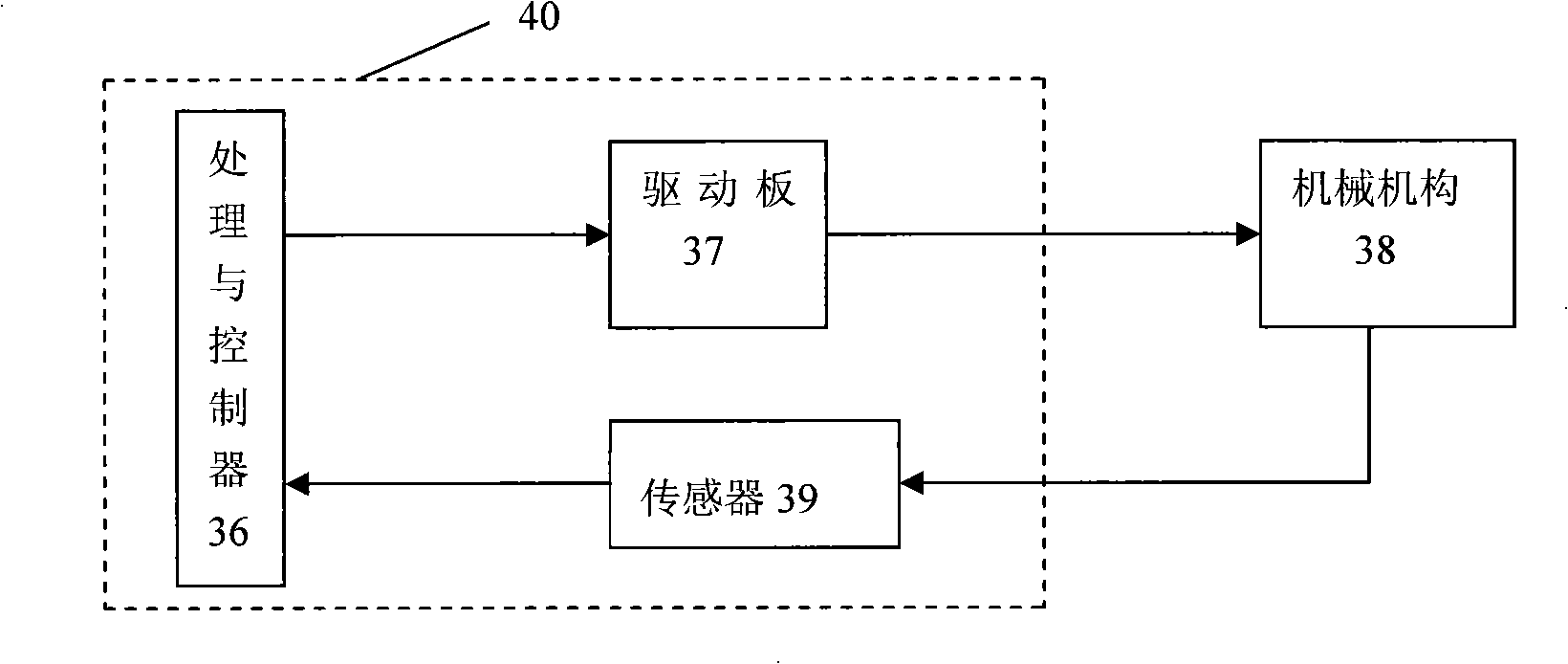
[0016] Such as figure 1 , figure 2 As shown, this embodiment includes: a control detection system 40 and a mechanical mechanism 38 .
[0017] Described mechanical mechanism 40 comprises one group of footing 1, bottom plate 33, two columns (second column 3, first column 28), top plate 20, the reduction wheel (the 4th reduction wheel 13, the 4th reduction wheel 13, The 3rd deceleration wheel 19, the second deceleration wheel 26, the first deceleration wheel 31), deceleration arc (the first deceleration arc 2, the 3rd deceleration arc 11, the 4th deceleration arc 14, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More