

Calibrating method of structural parameters of binocular visual sensing system
A sensor system and binocular vision technology, applied in the field of visual measurement, can solve problems such as inapplicable measurement, and achieve the effect of simple calibration method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Reference will now be made in detail to embodiments of the invention, examples of which are illustrated in the accompanying drawings, wherein like reference numerals refer to like parts throughout. The embodiments are described below in order to explain the present invention by referring to the figures.
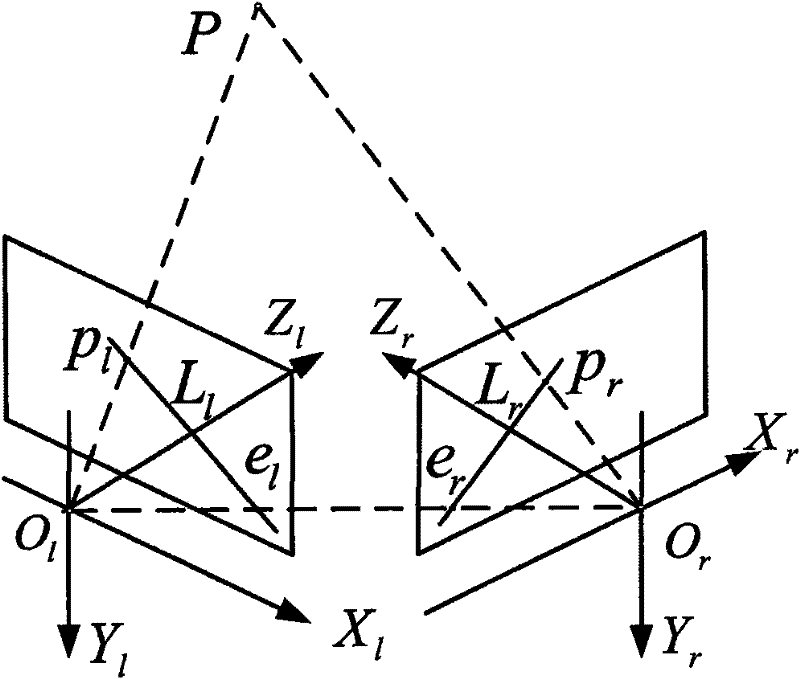
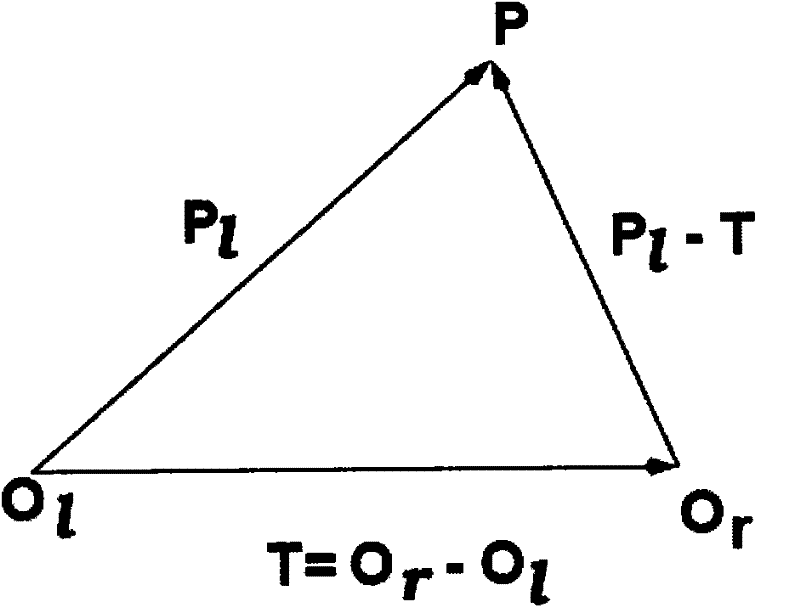
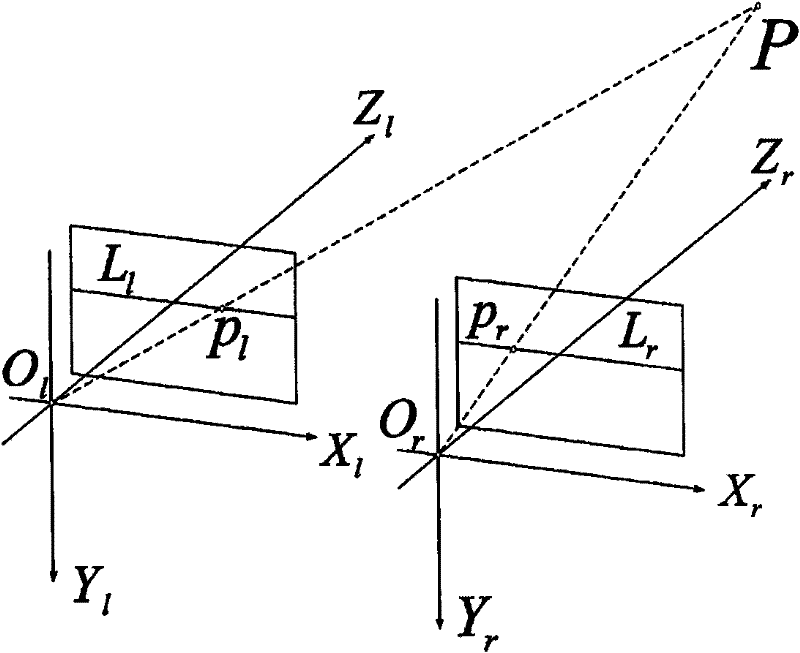
[0015] Aiming at the problems existing in the prior art, the present invention introduces the concepts of epipolar geometry and fundamental matrix, but only uses the spatial geometric relationship between the binocular cameras to calibrate the structural parameters of the binocular vision sensing system, thus avoiding the need to solve linear A large number of calculations and errors introduced by the equation.
[0016] The present invention introduces a new calibration method. This method is based on the known internal parameters of the camera (including the distortion coefficient), and uses the theory of epipolar geometry to obtain the fundamental matrix including t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More