

Method for estimating body posture angle of humanoid robot in real time
A humanoid robot and robot technology, applied in the field of robotics, can solve the problems of inaccurate static inclination angle information and the inability to overcome angular velocity integration errors, etc., to achieve real-time accurate estimation and overcome drift effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
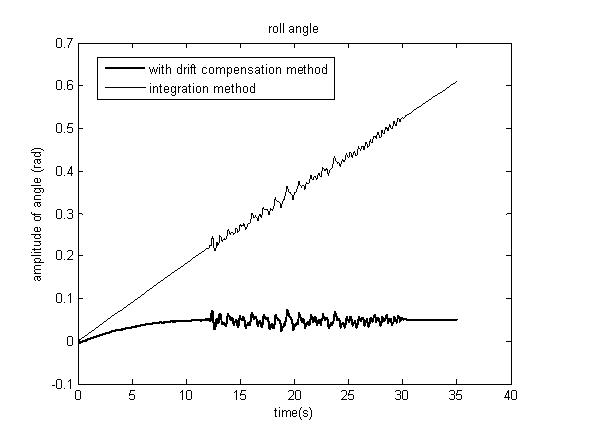
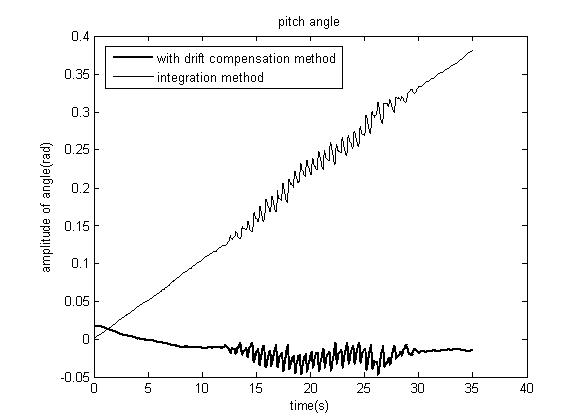
[0075] image 3 and Figure 4 Showing the difference between applying the method of the present invention and the existing integration method on the humanoid robot, setting the walking speed of the robot to be 0.8km / h, by image 3 It can be seen that due to the lack of rigidity of the robot's hip, the rolling angle of the robot changes periodically during walking, and this data reflects the change of the rolling angle during the robot's motion. Due to the deviation of the initial position or zero position of the robot, the roll angle is not zero. From the comparison with the integral method, it can be seen that this method effectively overcomes the drift problem of angular velocity integration. Depend on Figure 4 It can be seen that when the robot motion is over, the data of the pitch angle remains stable all the time. In summary, this method can effectively overcome the drift problem of the angular velocity integral, reflect the changes in the pitch and roll attitude ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More