

Myoelectric prosthesis control source lead optimization method based on correlation coefficients
A technology of correlation coefficient and optimization method, applied in the direction of prosthesis, medical science, etc., can solve the problems of low flexibility of prosthesis, poor degree of freedom, affecting the portability and control efficiency of EMG prosthesis, etc., to save forecast time and achieve a considerable market. Prospects, the effect of important application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
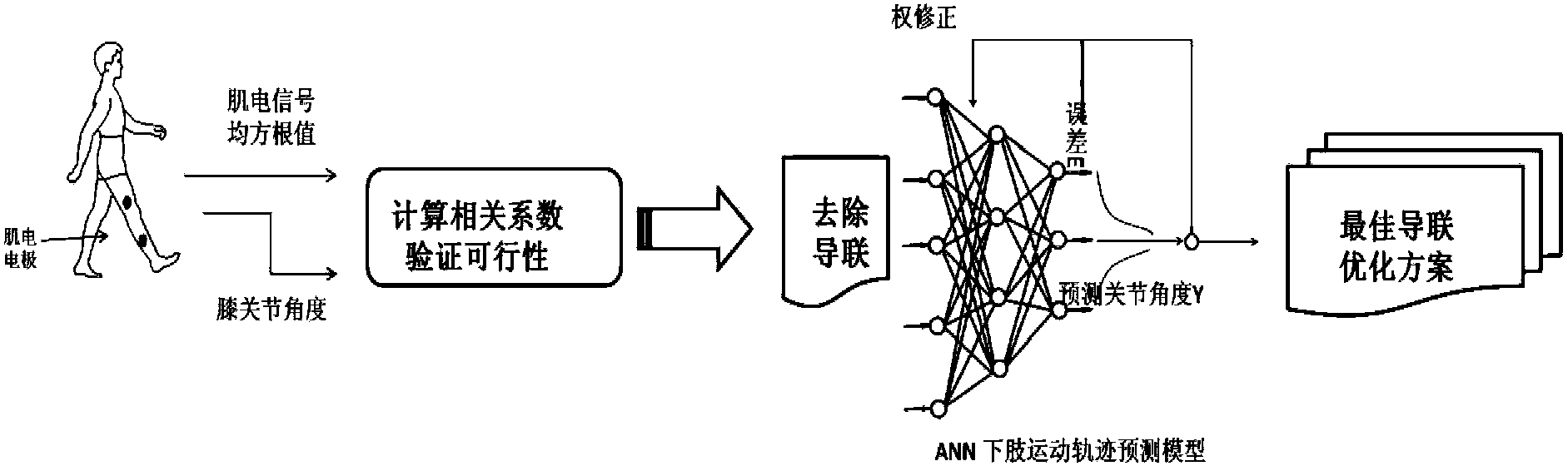
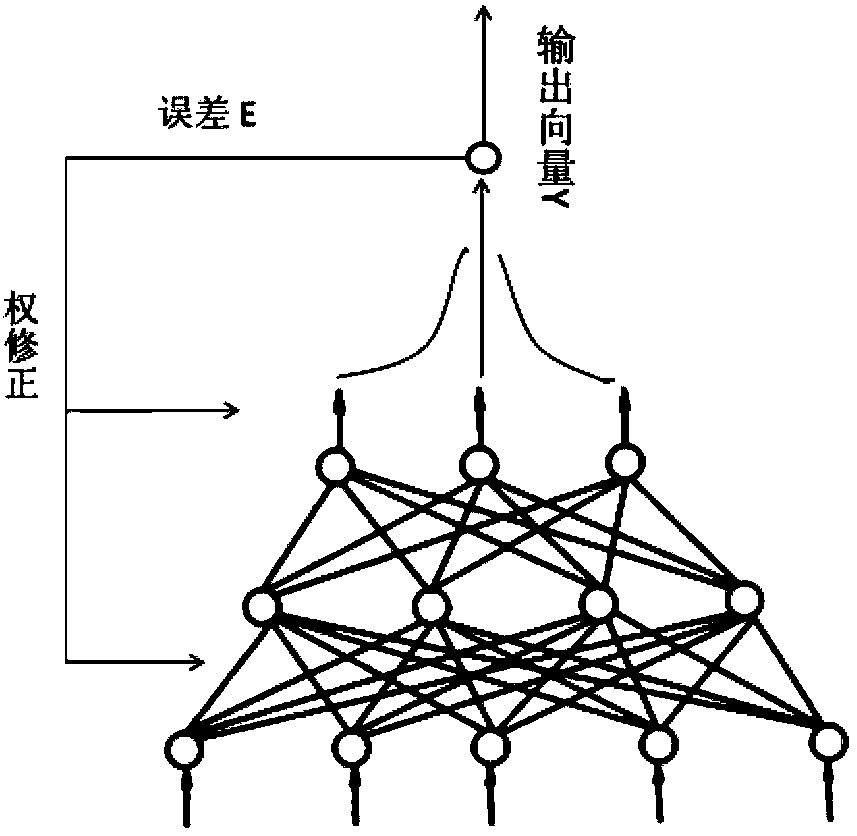
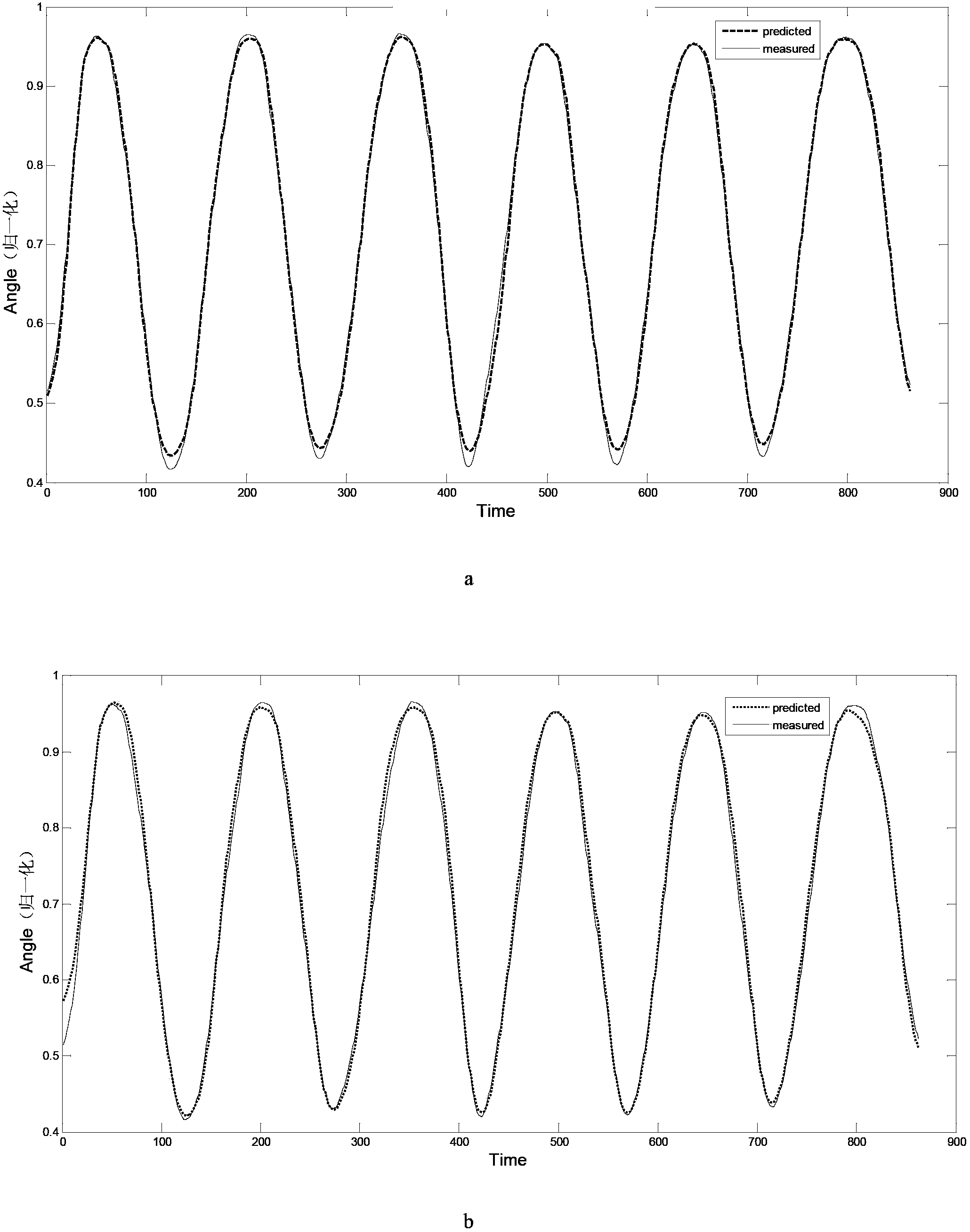
[0030] A new method for optimizing the leads of myoelectric prosthetic signal sources based on correlation coefficients under different movements is proposed. Its technical process is to extract the myoelectric signals of six muscles in the process of squatting, standing up, knee extension and walking. They are: rectus femoris, biceps femoris, semitendinosus, soleus, tibialis anterior and Gastrocnemius muscle: use the 3D motion capture system to record the 3D coordinates of human movement, and then obtain the angle information of the knee joint of the lower limbs. The root mean square value of myoelectricity was extracted as a characteristic parameter, and the correlation coefficient between it and the joint angle of the lower limbs was calculated. According to the size of the correlation coefficient, irrelevant muscle leads are removed in turn, and the error of different results is compared, and the best lead optimization method under different actions is obtained. This pred...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More