

Adaptive diameter pipeline robot walking device
A technology of pipeline robots and walking devices, which is applied to special pipes, pipe components, mechanical equipment, etc., and can solve problems such as pipeline welding installation, inspection and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
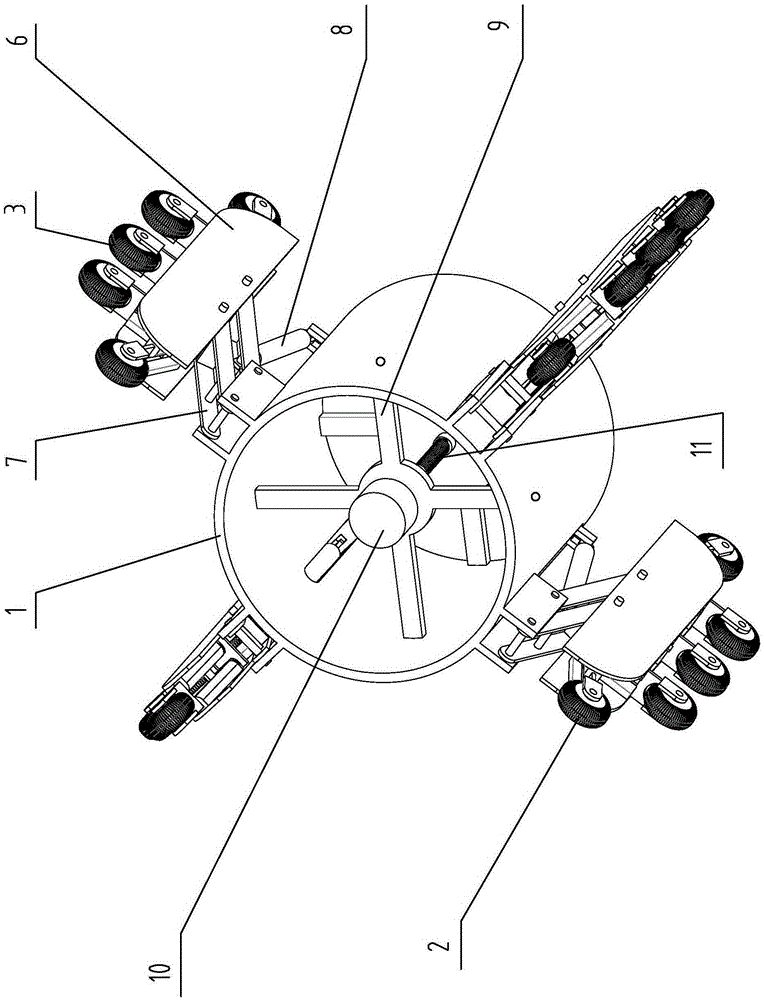
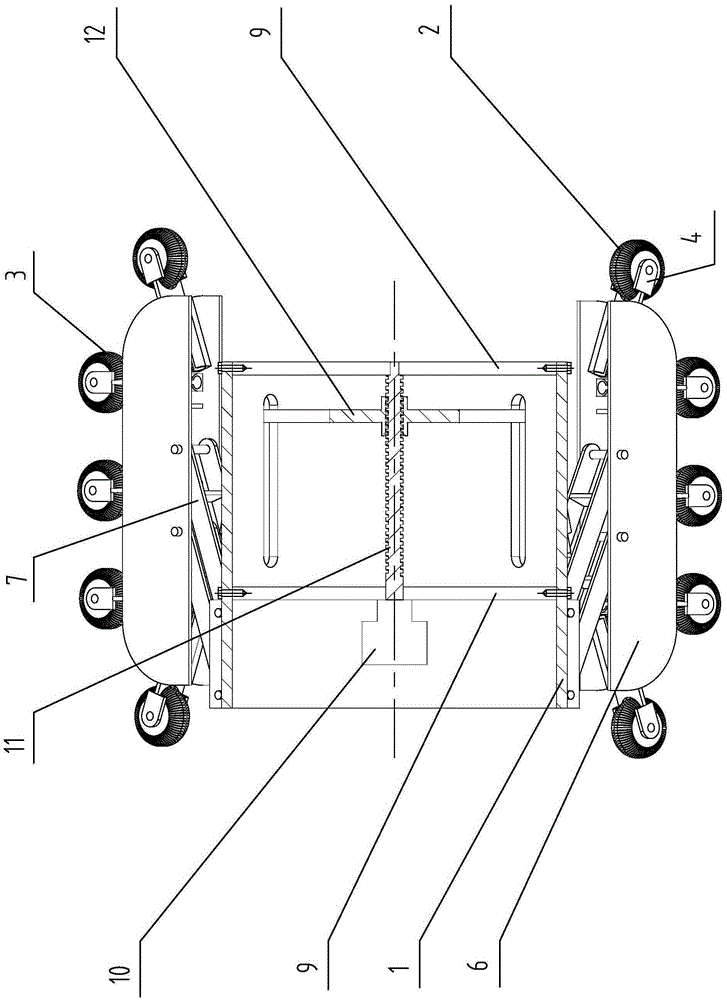
[0026] The walking device of the self-adapting diameter pipeline robot of the present invention is mainly composed of a barrel body 1, a variable diameter mechanism and a walking mechanism.
[0027] The barrel body 1 adopts a cylindrical shape (compared with other shapes, the volume inside the cylinder is the largest, which is convenient for installing other accessories, such as batteries, etc.), and a cage is installed at the front and rear positions of the cylinder along the axial direction 9, such as figure 1 , figure 2 , Figure 4 shown.
[0028] The diameter reducing mechanism includes a diameter reducing motor 10, a leading screw 11, a cross-shaped moving frame 12, a diameter reducing elastic support rod 8 and a parallelogram connecting rod assembly 7, the leading screw 11 is coaxially arranged in the cylind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More