

Error Fusion Estimation Method for Probabilistic Hypothesis Density Filtering Radar System Based on ads‑b
A technology of probability hypothesis density and radar system, which is applied in the field of sensor error registration, can solve the undiscovered problems such as probability hypothesis density filter radar system error fusion estimation method, and achieve the effect of high estimation accuracy and good estimation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The ADS-B-based probability hypothesis density filter radar system error fusion estimation method provided by the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
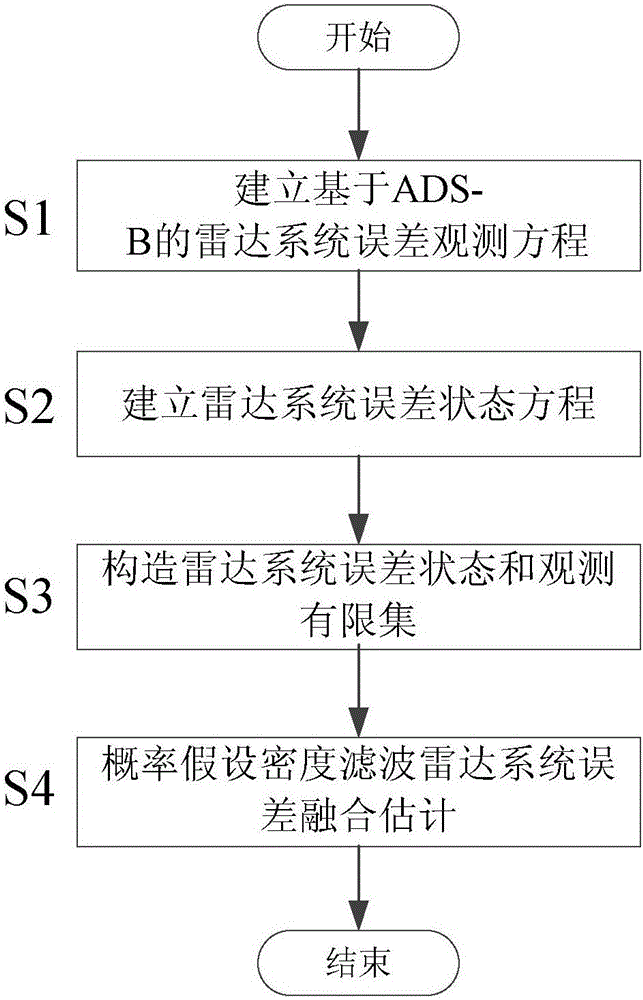
[0026] figure 1 A flow chart of the error fusion estimation method for the ADS-B-based probability hypothesis density filtering radar system provided by the present invention. All the operations are completed in the computer system, and the main body of the operation is the computer system.
[0027] Such as figure 1 As shown, the ADS-B-based probability assumption density filtering radar system error fusion estimation method provided by the present invention includes the following steps carried out in order:
[0028] 1) Establish the S1 stage of the radar system error observation equation based on ADS-B:
[0029] In this stage, coordinate projection technology is used to first convert the ADS-B observation value of the target into th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More