

Upper body experiment platform of humanoid robot
A technology of humanoid robot and experimental platform, which is applied in the verification of robot humanoid motion and the field of humanoid robot experimental platform, can solve the problems that the theoretical verification of humanoid robot cannot be realized, and achieve rich model selection, reduce load, and simplify complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings.
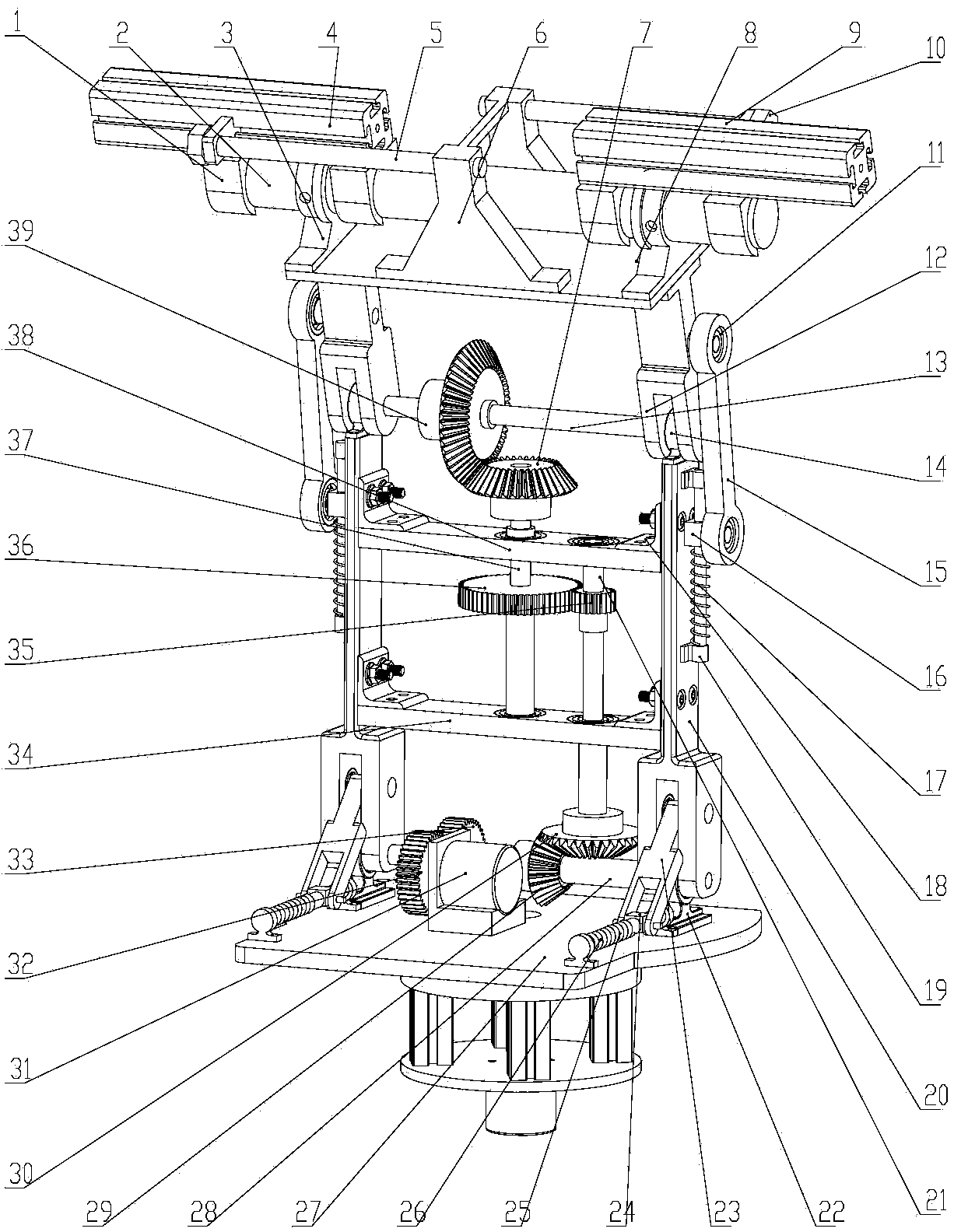
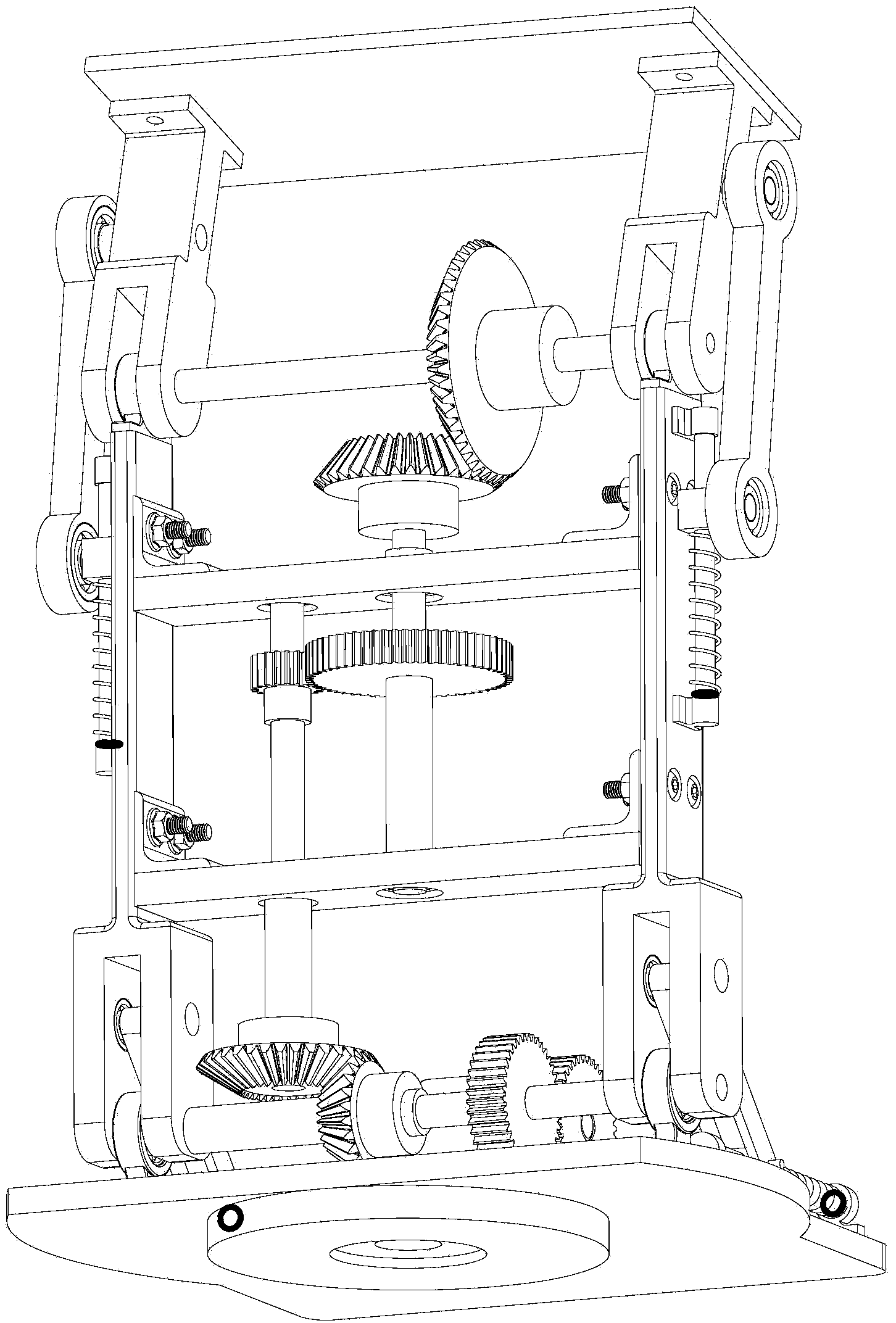
[0022] With reference to accompanying drawing, structure of the present invention comprises waist, upper trunk and shoulder three parts.
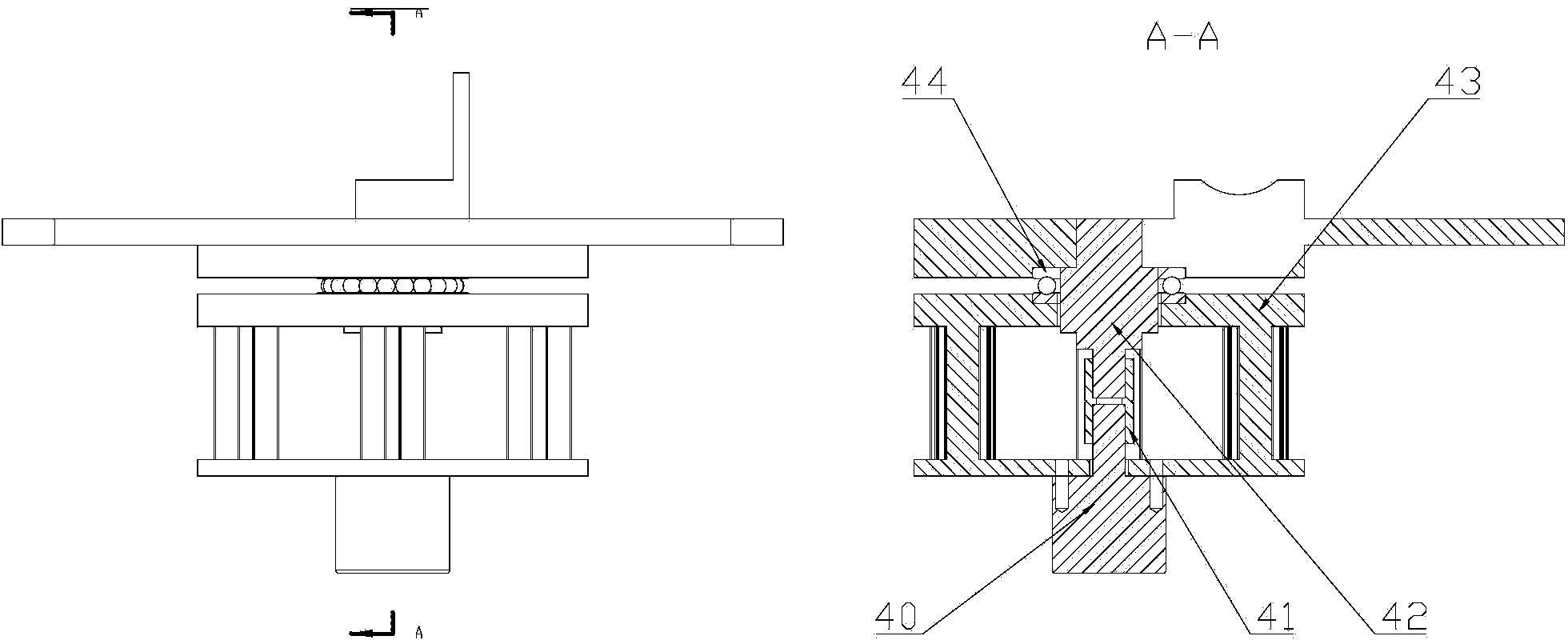
[0023] Waist structure such as figure 2 As shown, it is composed of a second motor 40 , a shaft coupling 41 , a waist rotating shaft 42 , a rotating bracket 43 and a thrust bearing 44 . Rotating support 43 is divided into upper and lower layers, and supports with column in the middle. The second motor 40 is fixed at the center position of the lower layer of the rotating bracket 43, the upper layer of the rotating bracket 43 is provided with a thrust bearing 44, and the second motor 40 is placed on the central axis. The upper ring of the thrust bearing 44 is embedded in the waist base plate 27, which is interference fit with the waist rotating shaft 42, and the lower ring of the thrust bearing 44 is embedded in the rotating brac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More