

A substation indoor inspection robot system and inspection method thereof
An inspection robot and robot technology, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of equipment collision, less sampling signals and high cost of online monitoring of inspection robots, and prevent accidental collision or fall. The effect of good data consistency, accurate and reliable positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
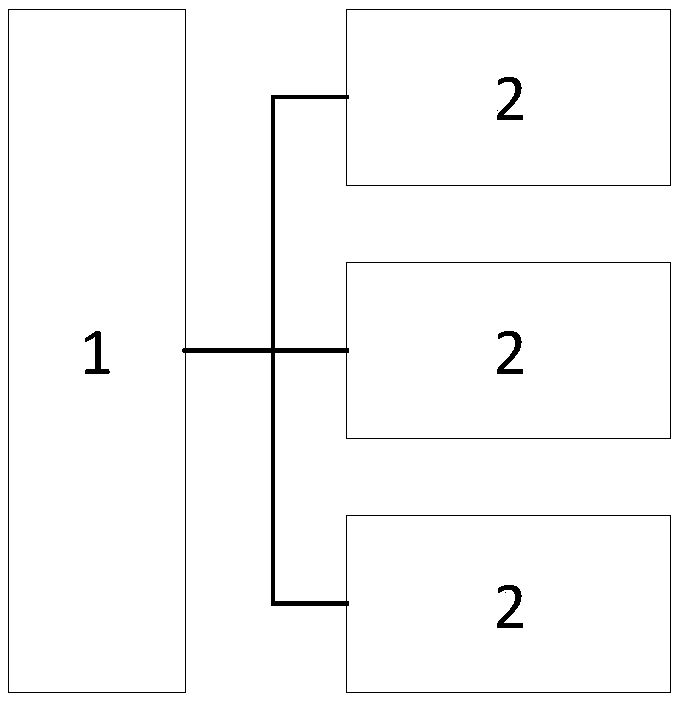
[0049] Such as figure 1 As shown, a substation indoor inspection robot system includes a remote control center 1 and a rail robot terminal system 2 .
[0050] The remote control control center 1 is connected to at least one rail robot terminal system 2 through a network;
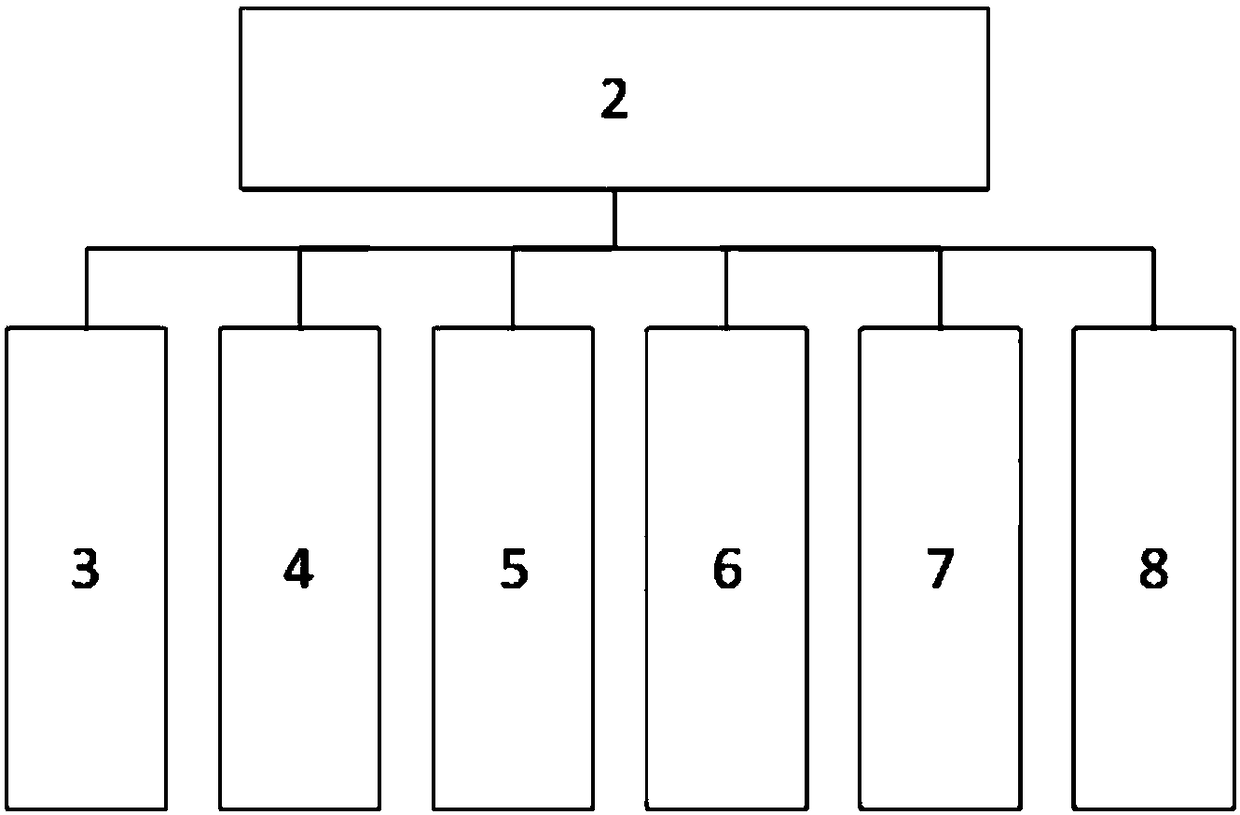
[0051] Such as figure 2 As shown, the rail robot terminal system 2 includes a robot motion module 3 , a control module 4 , a communication module 5 , a power supply module 6 , a detection module 7 and a safety protection module 8 .
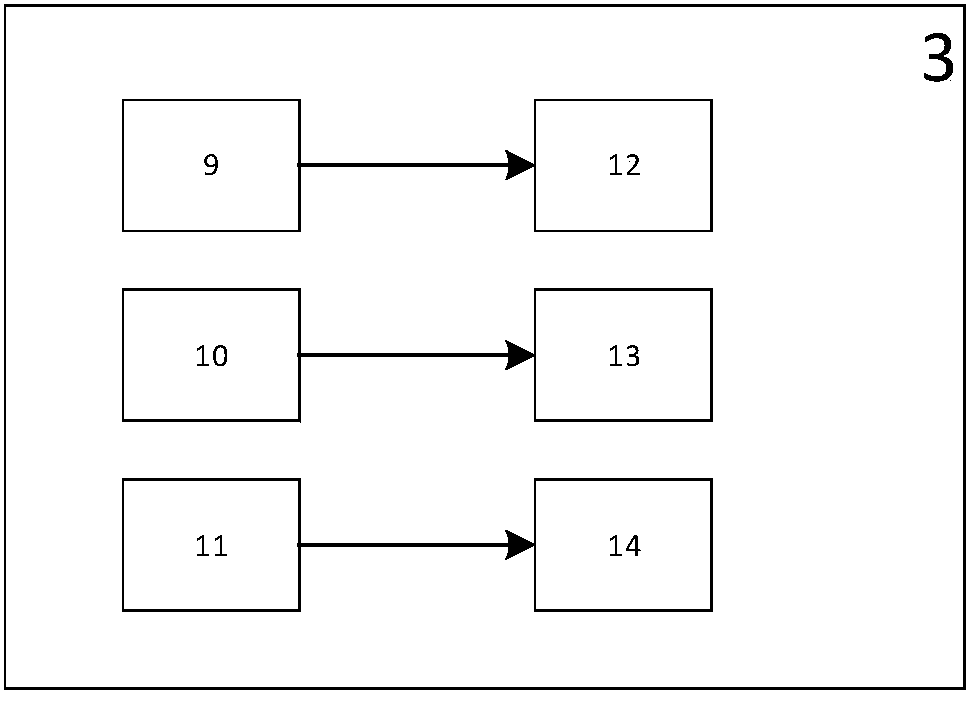
[0052] Such as image 3 and Figure 4 As shown, the motion module 3 includes an X-axis motor 9, a Y-axis motor 10, a Z-axis motor 11, an X-axis motion mechanism 12, a Y-axis motion mechanism 13, and a Z-axis motion mechanism. The three motors are respectively installed in three motion In terms of mechanism, the motor 9 on the X-axis motion mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More