

Filter for BDS (beidou navigation satellite system) and SINS (strapdown inertial navigation systems) navigation and positioning system and filtering method
A navigation positioning and filter technology, applied in the field of navigation positioning, can solve problems such as the exponential growth of the number of Gaussian components, the divergence of the nonlinear system estimation model, and the limitation of the real-time performance of navigation results, so as to achieve good real-time performance and nonlinear approximation Good, the effect of ensuring the stability of the calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0044] An embodiment of the present invention provides a filtering method for a BDS / SINS navigation and positioning system, and the present invention can be applied in navigation and positioning systems such as a vehicle navigation and positioning system, a ship-borne navigation and positioning system, and an unmanned aerial vehicle navigation and positioning system.
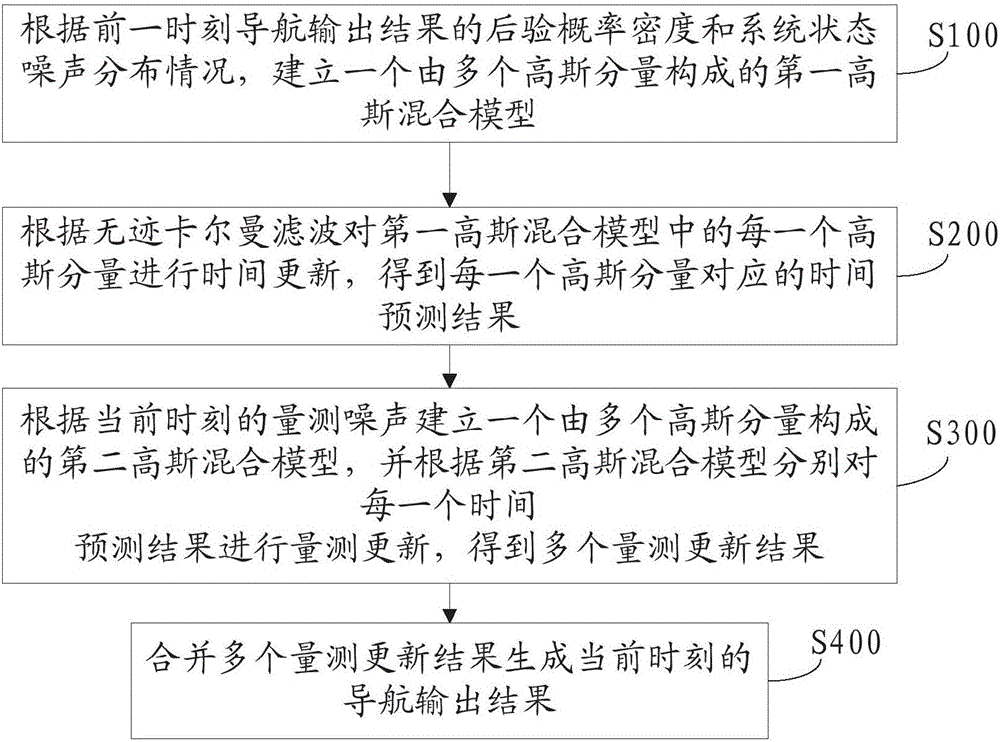
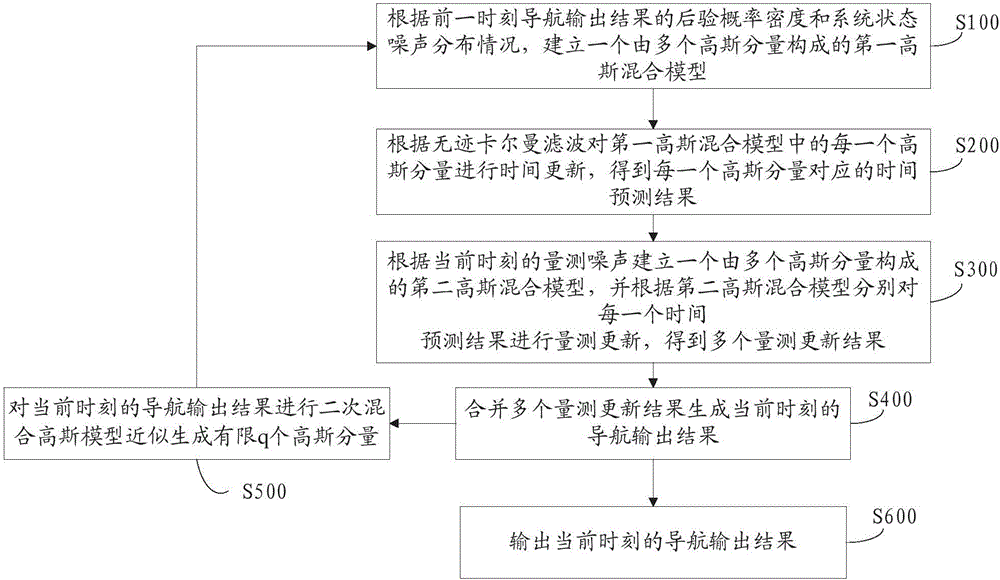
[0045] The following will combine specific implementation methods, figure 1 and figure 2 The processing flow shown is described in detail, and the content can be as follows:
[0046] Step S100, according to the posterior probability density of the navigation output result at the previous moment and the distribution of system state noise, a first Gaussian mixture model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More