

An obstacle detection method for unmanned vehicles based on tegrax1 radar data
A technology of obstacle detection and radar data, which is applied in the direction of radio wave measurement system, measurement device, electromagnetic wave reradiation, etc., can solve the problems of large amount of processing algorithm calculation, too large data, and inability to send obstacle information, etc., to achieve improved real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The invention provides an unmanned vehicle obstacle detection method based on Tegra X1 radar data, adopts velodyne lidar as a sensor to collect environmental information, and is equipped with an NVIDIA Tegra X1 mobile processor to realize unmanned vehicle obstacle detection. In order to further illustrate the technical content of the present invention, the innovative points have good effects, and the following describes in detail in conjunction with the embodiments and accompanying drawings.
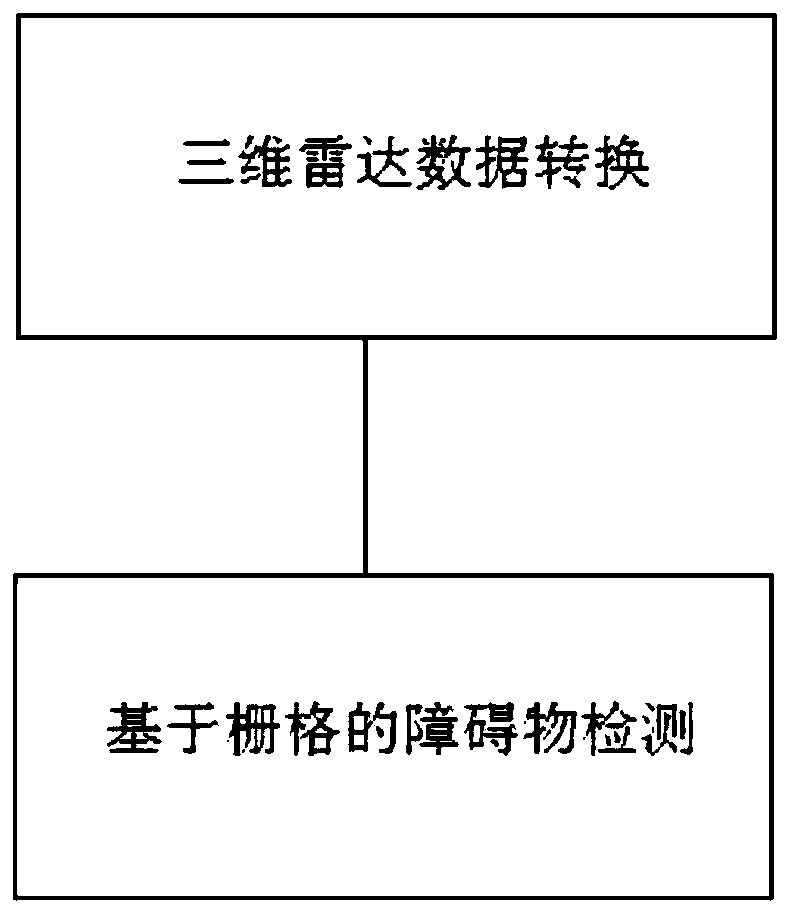
[0025] Such as figure 1 As shown, the inventive method is divided into two steps: 1, three-dimensional radar data conversion 2, obstacle detection
[0026] Since there are more complex logic processing and transaction management in the process of 3D radar data conversion, this process is not suitable for calculation in GPU. The present invention therefore handles this process by using the NVIDIA Tegra X1 arm processor.
[0027] Due to the large amount of radar point cloud data (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More