

A method and device for assisting an unmanned ship to capture a drone
A technology for unmanned aerial vehicles and unmanned ships, applied in the field of assisting unmanned ships to capture unmanned aerial vehicles, can solve the problems of missing the best time to capture target unmanned aerial vehicles, and unable to cope with the occasions with multiple target unmanned aerial vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
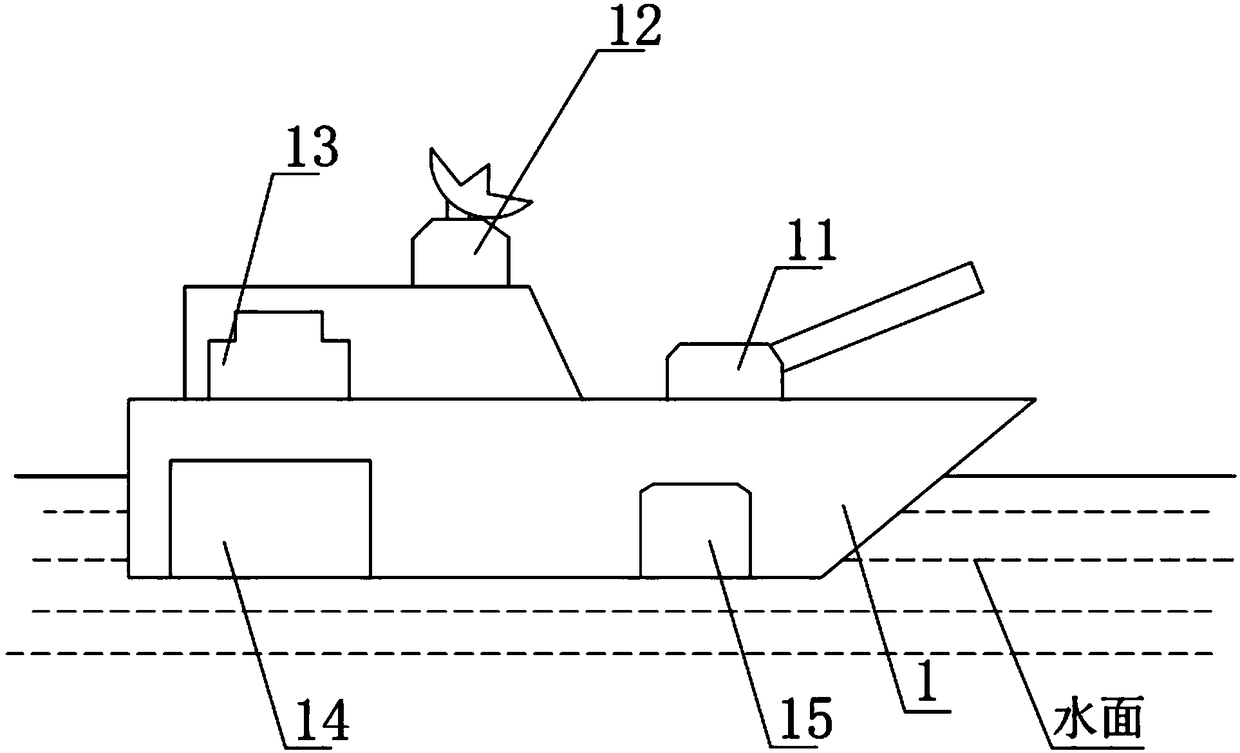
[0046] Embodiment 1 of the present invention provides a device for assisting unmanned ships to capture unmanned aerial vehicles. The device includes a hull 1, such as figure 1 As shown, the hull 1 is provided with a shell launching platform 11, a radar detection device 12, a communication module 13, a power assembly 14 and a control center 15, wherein the shell launching platform 11, the radar detection equipment 12, the communication module 13 and the power assembly 14 are respectively It is connected with the control center 15 .
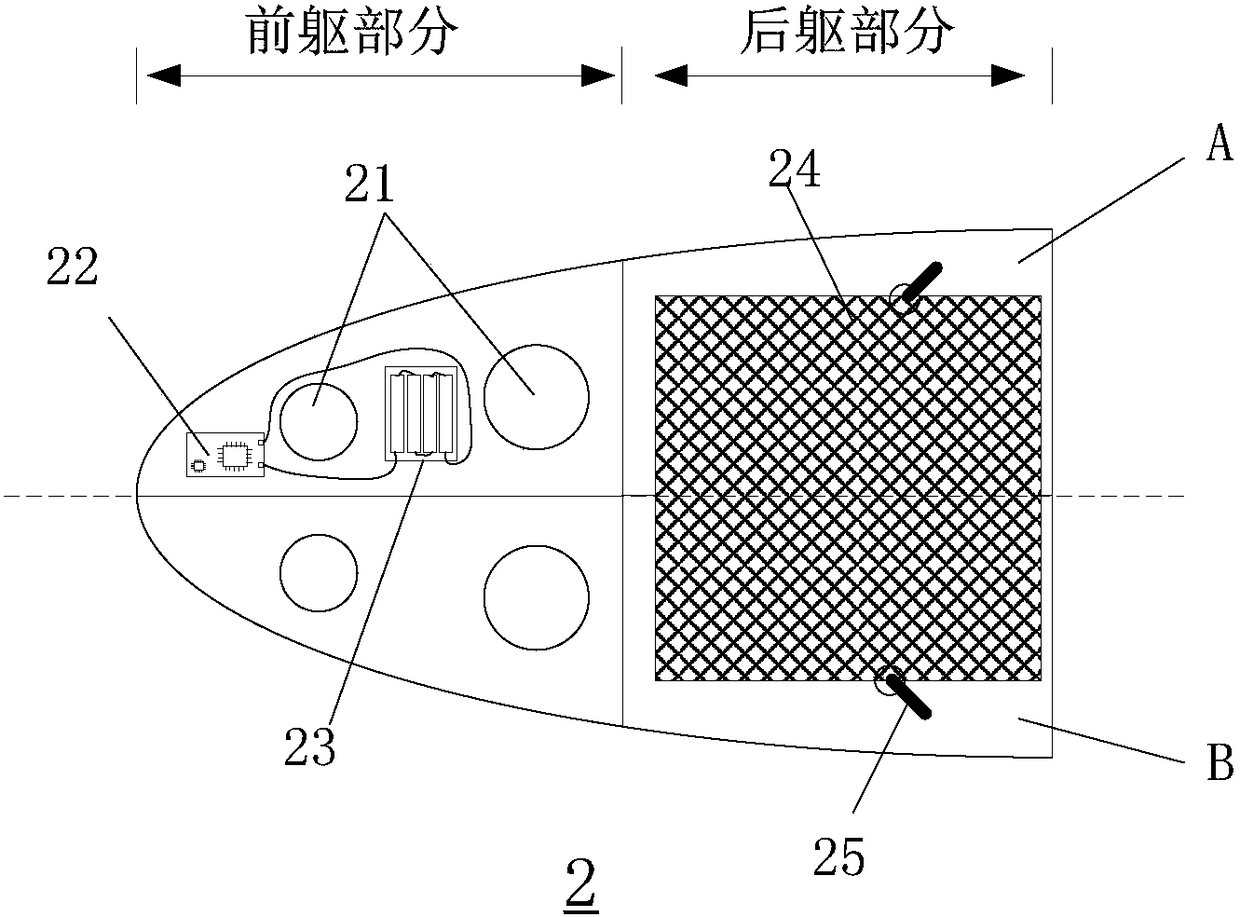
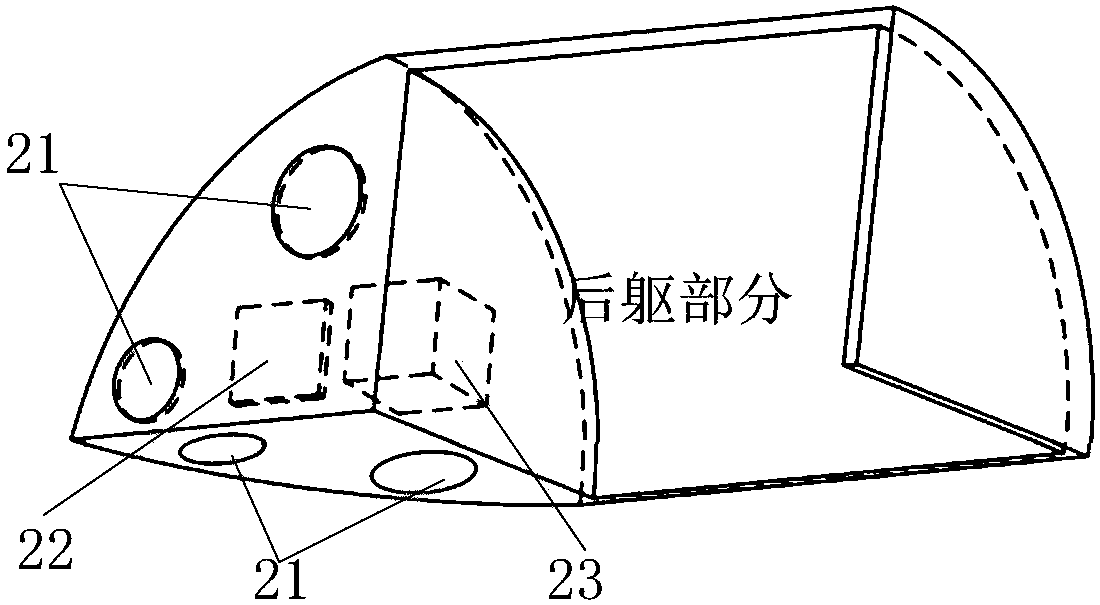
[0047] The shell launching platform 11 is equipped with a catch net warhead 2, which is functionally divided into a forebody part and a hindquarter part, and is symmetrically divided into two, three or four petals by the central axis from the connection structure. . like figure 2 As shown, among them, the central axis (for figure 2 Shown by the dotted line in the middle) symmetrically divided into two lobes (including figure 2 Flaps A and B sh...
Embodiment 2
[0060] After providing the device for assisting unmanned ships to capture UAVs described in Embodiment 1, the embodiment of the present invention focuses on providing a method for assisting unmanned ships to capture UAVs. The device for assisting unmanned ships to capture drones described in 1, such as Figure 7 As shown, the method includes:
[0061] In step 201, after the radar of the unmanned ship completes the positioning of the drone, it launches the catch net warhead 2 through the shell launcher 11 in the direction of the drone's flight.
[0062] Wherein, in order to further reduce the weight of the catching net warhead 2, its shell material preferably can be made of plastic, for the unmanned aerial vehicle applicable to common 50cm*50cm, the optional catching net warhead 2 quality is 5Kg, Wherein, the quality of 1.5Kg is distributed to catch net, and the quality of 2Kg is distributed to the plastic shell of catch net warhead 2, and the quality of 1.5Kg is distributed t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More