

A non-contact man-machine game control method and system based on machine vision
A non-contact, machine vision technology, used in indoor games, board games, sports accessories, etc., can solve problems such as reading chess pieces, and achieve the effect of strong stability, uncomplicated system, and strong stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
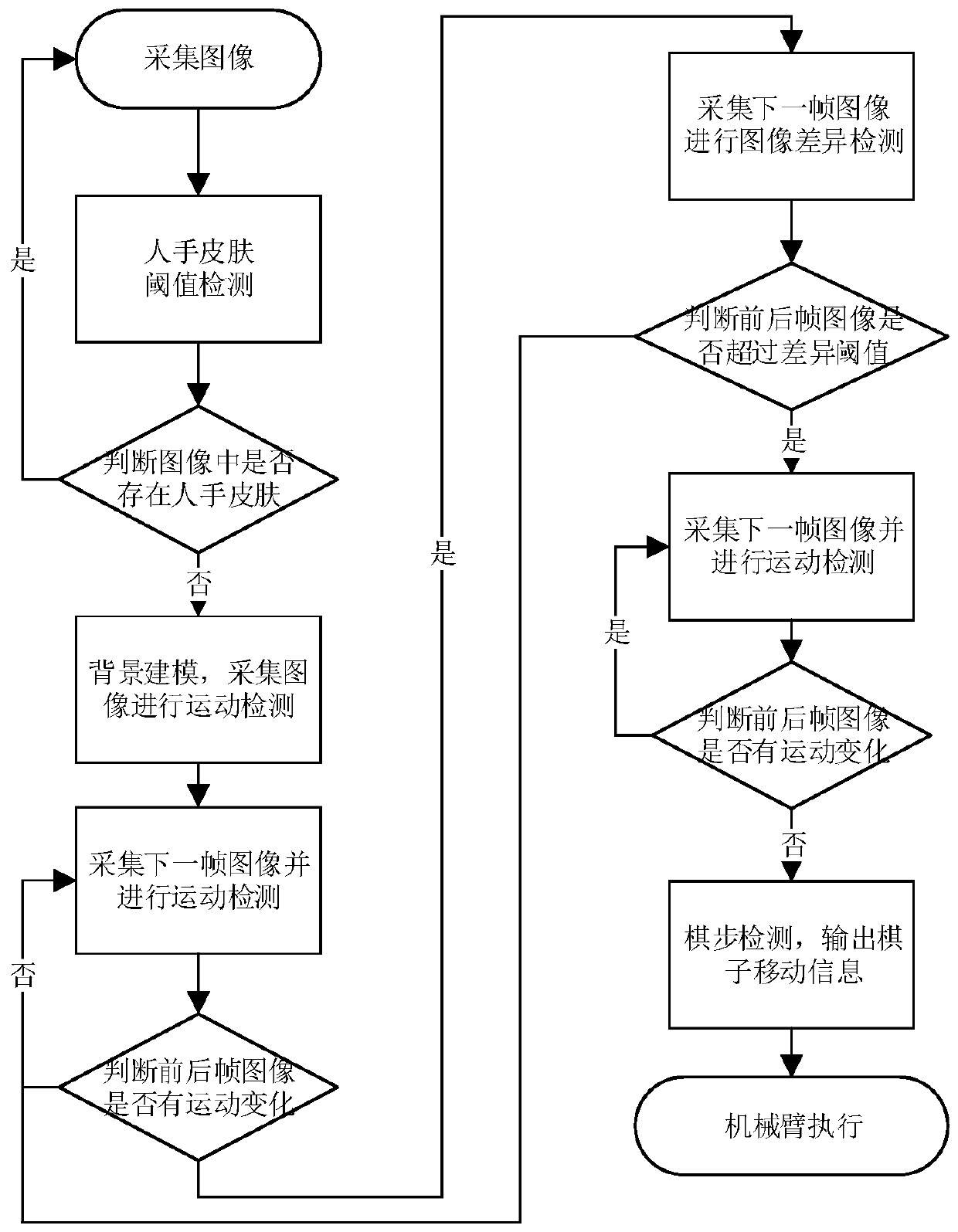
[0064] A non-contact human-computer game control method based on machine vision, the overall process is as follows figure 2 shown, including the following steps:
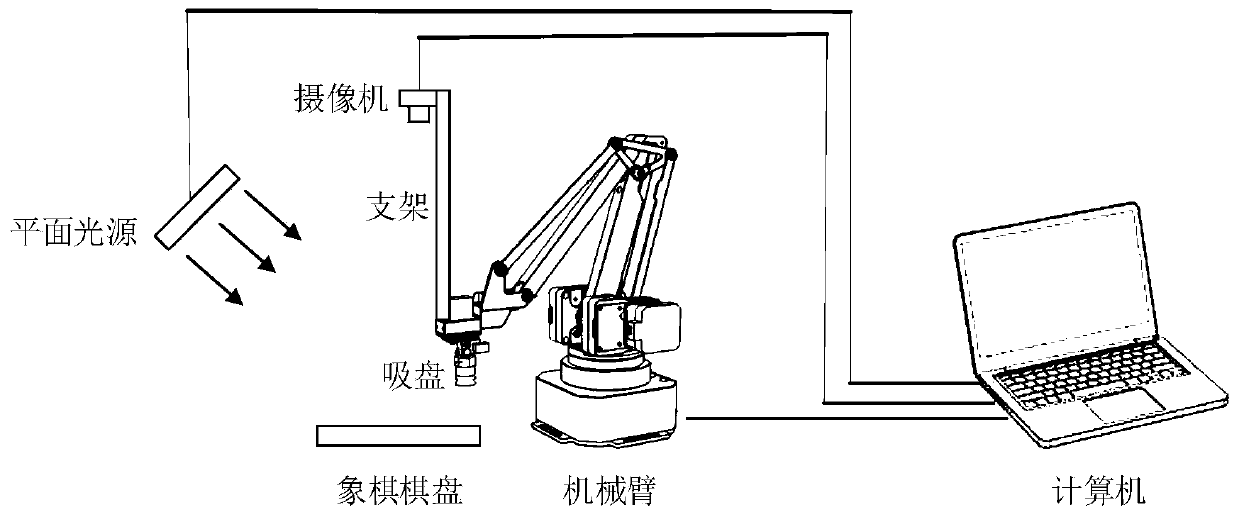
[0065] Step 1: Build a chess robot image acquisition unit;
[0066] The image acquisition unit includes a plane light source and a camera, the plane light source is arranged on one side of the chessboard, and the camera is arranged directly above the chessboard, and the camera and the plane light source are all controlled by the control unit of the chess robot;
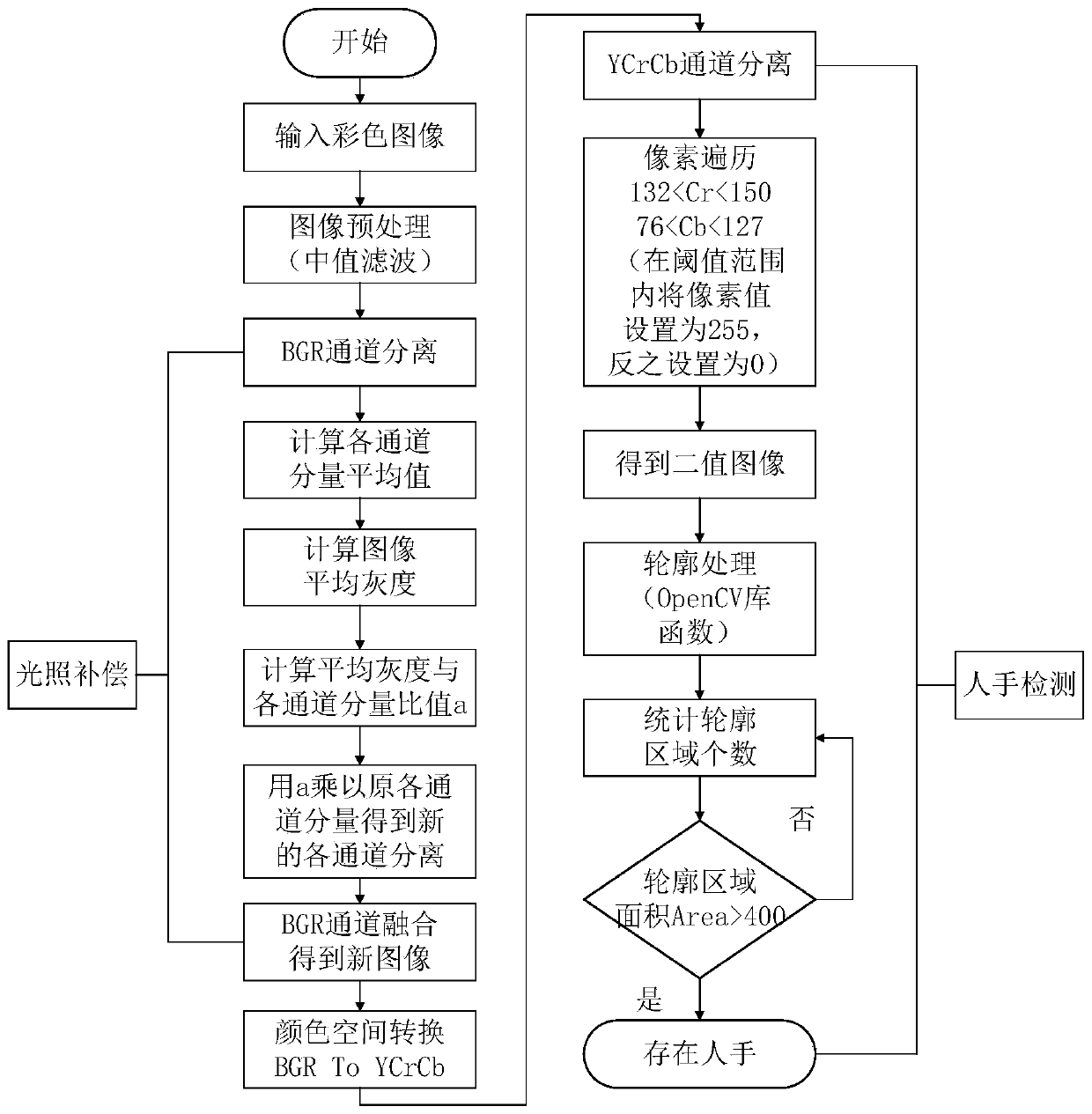
[0067] Step 2: Utilize the chessboard image sequence without hand skin collected in real time by the image acquisition unit to construct a chessboard background model, such as image 3 shown;
[0068] The construction process of the chessboard background model is as follows:
[0069] Step 2.1: Use the image acquisition unit to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More