

Steering stability control system and method based on four-wheel independent driving electric vehicle
A four-wheel independent drive and stability control technology, applied in the direction of braking system interaction, automatic starting device, brake, etc., can solve the problems of prone to traffic accidents, prone to instability, prone to accidents, etc., to achieve the elimination of stability Sexual hazards, improve steering stability, and ensure the effect of steering stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
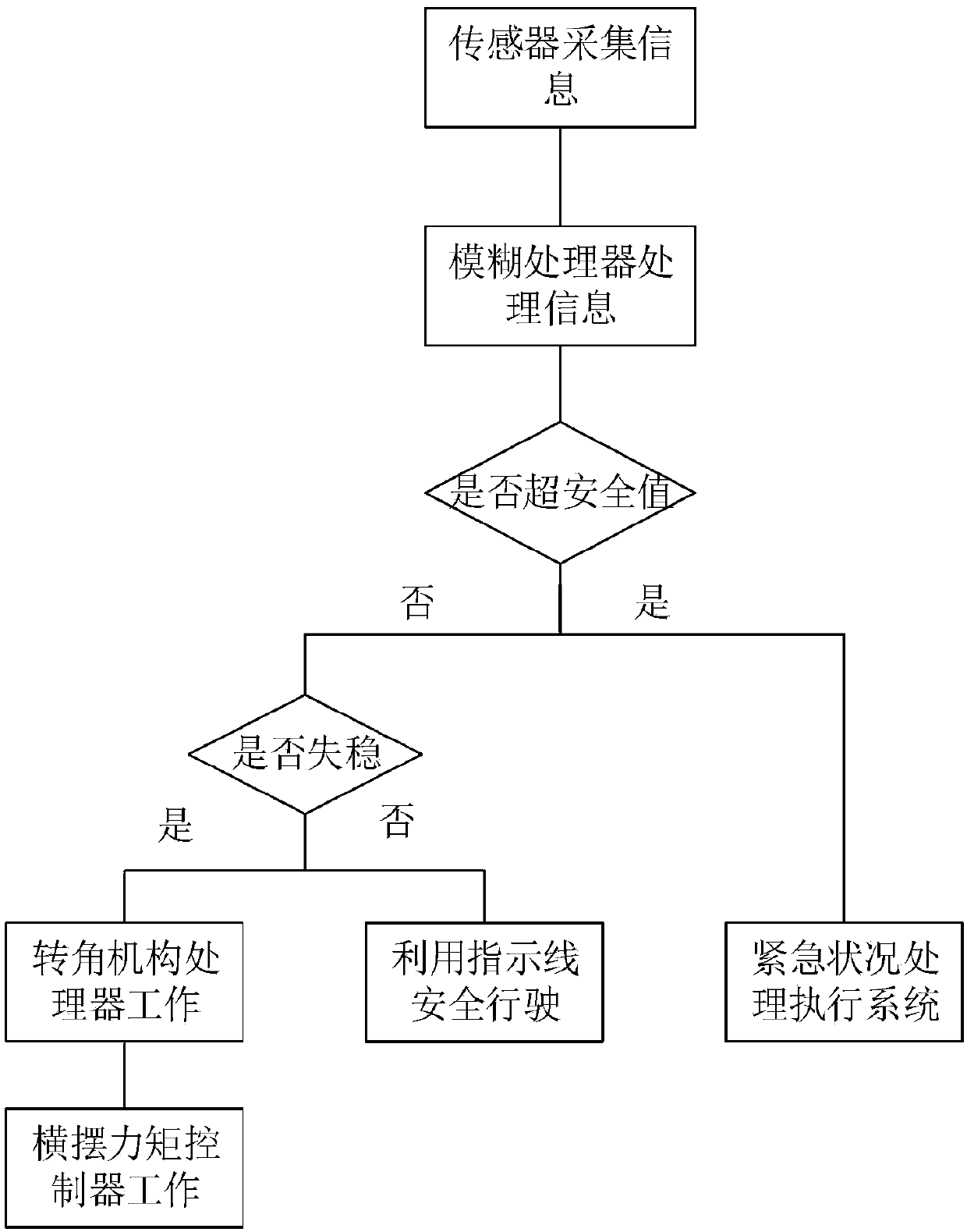
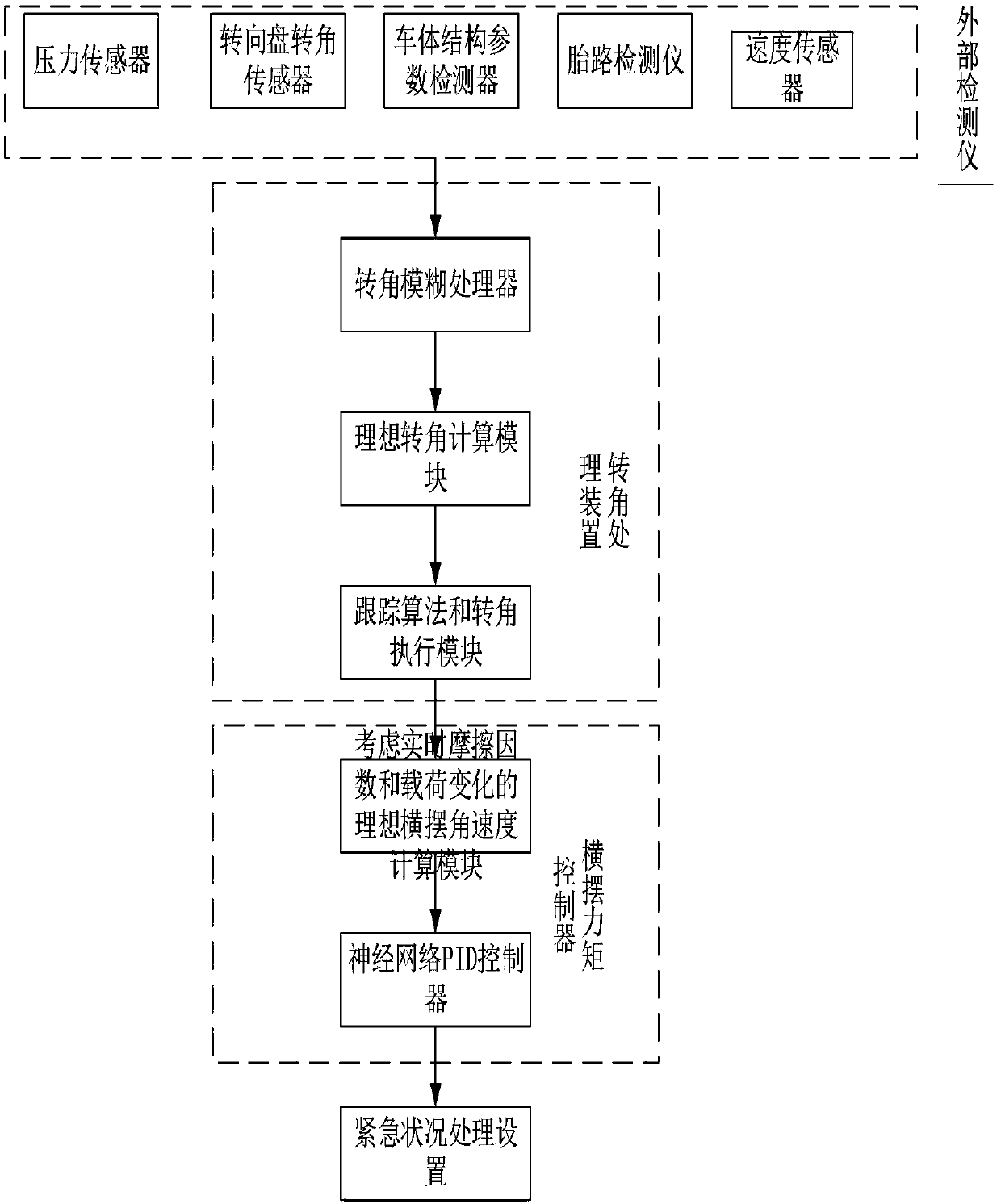
[0038] The present invention will be further described below in conjunction with the accompanying drawings. Such as Figure 1-2As shown, the road conditions and car body parameters are measured by pressure sensors, radar speedometers, tire road monitors, and corner sensors. The ideal corner angle is calculated according to the measured real-time information and combined with the dynamic model. Instantly use the sensor to feed back the actual rotation angle information to the instability device part of the central control module, and obtain the best adjusted rotation angle by making a difference. The algorithm controller adjusts the corner to the best. The adjusted vehicle state information is transmitted to the yaw rate controller, and the ideal yaw rate is calculated by using the dynamic model adding load and friction factor, and the difference is made with the actual yaw rate, and the optimal yaw rate is obtained by processing with the neural network PID controller. Additi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More