

Distance measurement method and system of virtual fixture and mechanical arm control method and system
A technology of virtual fixture and distance measurement, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of inability to balance real-time and accuracy, achieve good portability and scalability, improve computing speed, and ensure real-time sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
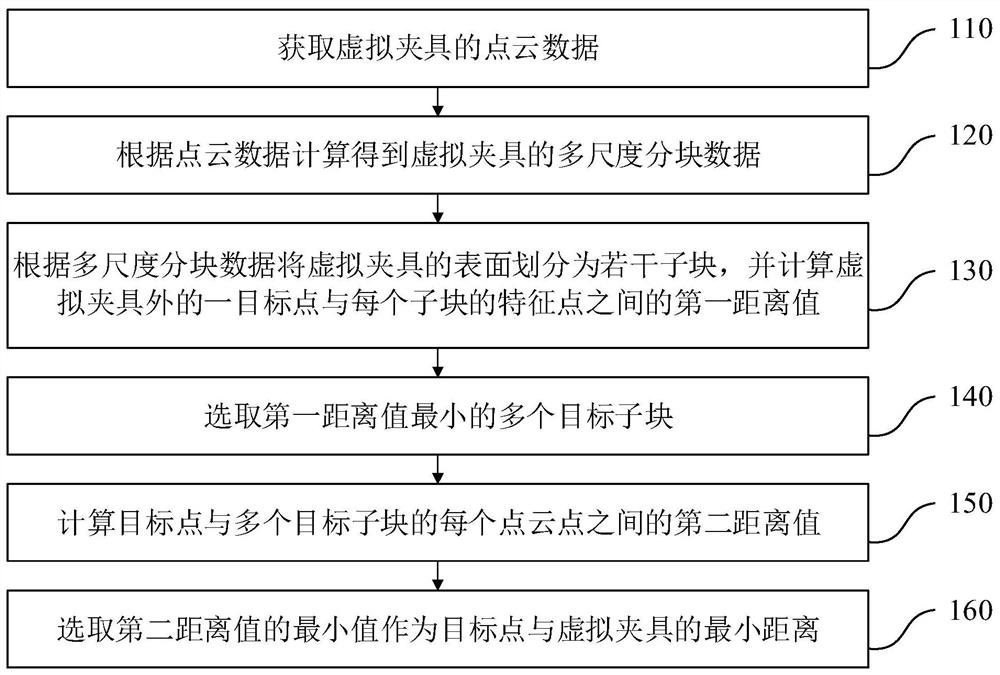
[0086] A distance measurement method for a virtual fixture, such as figure 1 As shown, the distance measurement method includes:
[0087] Step 110, obtaining point cloud data of the virtual fixture; the point cloud data includes a plurality of point cloud points on the surface of the virtual fixture and position data of each point cloud point;
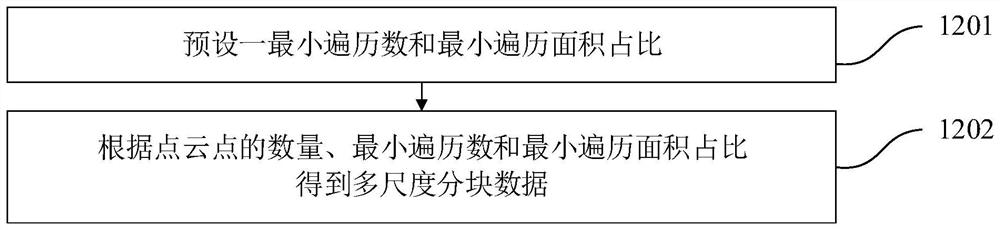
[0088] Step 120, calculating and obtaining multi-scale block data of the virtual fixture according to the point cloud data;
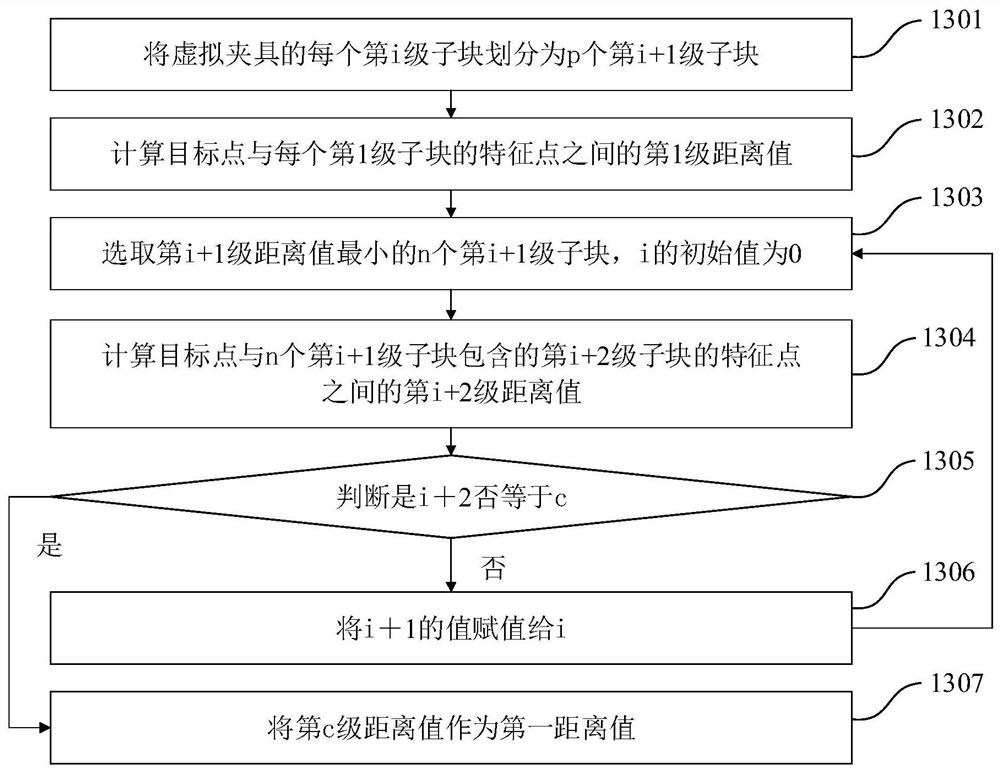
[0089] Step 130, divide the surface of the virtual fixture into several sub-blocks according to the multi-scale block data, and calculate the first distance value between a target point outside the virtual fixture and the feature point of each sub-block; the feature point is each sub-block Any cloud point in the central area of , or the central position point of each sub-block.
[0090] Step 140, selecting a plurality of target sub-blocks with the smallest first distance value;
[0091] Step 150, calculatin...
Embodiment 2
[0125] A method for controlling a robotic arm, such as Figure 5 As shown, the mechanical arm is provided with a cutter head, and the target point is set as the position point of the cutter head, and the control method of the mechanical arm includes:
[0126] Step 201, setting the position point of the cutter head as the target point;
[0127] Step 202, using the distance measurement method of the virtual fixture in embodiment 1 to obtain the minimum distance between the cutter head and the virtual fixture;
[0128] Step 203, generating a motion signal according to the minimum distance between the cutter head and the virtual fixture;
[0129] Step 204, controlling the mechanical arm to drive the cutter head to move according to the motion signal.
[0130] In this embodiment, it can be set that when the cutter head approaches the safe curved surface, the cutter head moves at a slower speed and generates resistance, or it can be set that when the cutter head moves to the bound...
Embodiment 3
[0132] A distance measurement system for virtual fixtures, such as Image 6 As shown, the distance measurement system includes a point cloud data acquisition module 1, a multi-scale block data calculation module 2, a sub-block division module 3, a distance value calculation module 4, a target sub-block selection module 5 and a minimum distance determination module 6;
[0133] The point cloud data acquisition module 1 is used to obtain the point cloud data of the virtual fixture, and the point cloud data includes a plurality of point cloud points on the surface of the virtual fixture and position data of each point cloud point;
[0134] The multi-scale block data calculation module 2 is used to calculate and obtain the multi-scale block data of the virtual fixture according to the point cloud data;
[0135] The sub-block division module 3 is used to divide the surface of the virtual fixture into several sub-blocks according to the multi-scale block data;
[0136] The distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More