

Control method and system of robot based on virtual fixture
A technology of virtual fixture and control method, applied in the field of robot control method and system, can solve the problems of low processing efficiency and safety, lack of virtual fixture control method, and reduced robot operability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention is further illustrated below by means of examples, but the present invention is not limited to the scope of the examples.
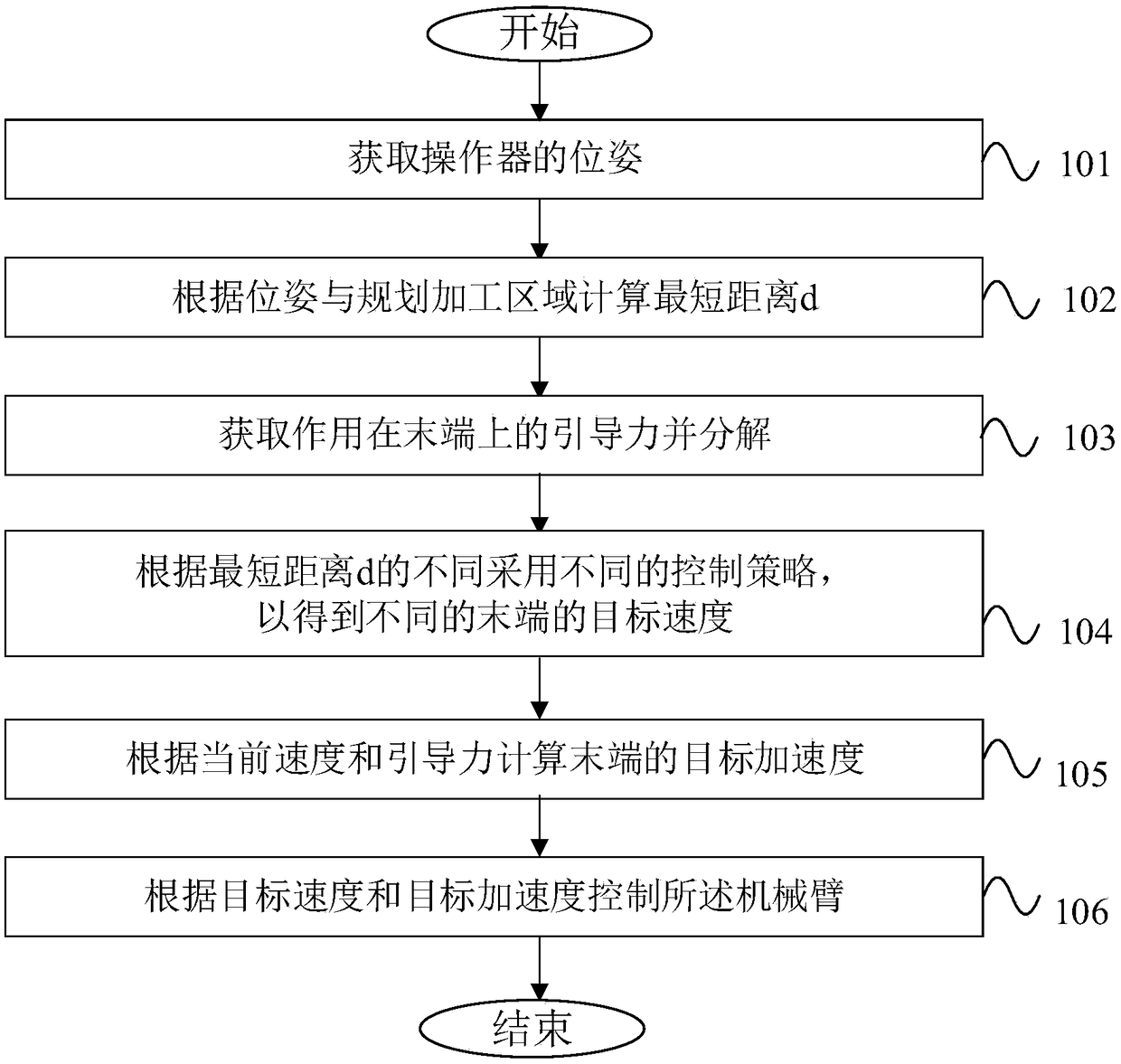
[0072] This embodiment provides a method for controlling a robot based on a virtual fixture, the robot includes a mechanical arm, and a manipulator is provided at the end of the mechanical arm. Such as figure 1 As shown, the control method of this embodiment includes the following steps:
[0073] Step 101. Obtain the pose of the manipulator, where the pose includes data corresponding to the position and pose.
[0074] Step 102. Calculate the shortest distance d according to the pose and the planned processing area.
[0075] In this step, it is also possible to determine the closest point X on the boundary of the planned processing area corresponding to the shortest distance d np .
[0076] Among them, d=‖X-X np ‖=(X-X np )·N np , N np is x np The boundary normal of the point, the direction points to the safe area, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More